Example 3: packing of GJKparticles
Here’s where your user finds out if your project is for them.
There are five kinds of shapes, namely sphere, polyhedron, cone,
cylinder and cuboid, in SudoDEM, for which the GJK algorithm of
contact detection is performed [^5], so that we coined a name
GJKparticle for grouping these particle shapes. In the Python module
_gjkparticle_utils (see Sec.
5.1.3{reference-type=“ref”
reference=“modgjkparticle”}), several construction functions are
provided including:
-
GJKSphere(radius,margin,mat)
-
GJKPolyhedron(vertices,extent,margin,mat, rotate)
-
GJKCone(radius, height, margin, mat, rotate)
-
GJKCylinder(radius, height, margin, mat, rotate)
-
GJKCuboid(extent, margin,mat, rotate)
Note: a margin is used to expand a particle for achieving a better
computational efficiency, which however should be large enough for
ensuring that collision occurs in this small region but small enough for
shape fidelity.
Similar to Example 1, we conduct some simulations of particles free
falling into a cubic box. We first import some modules:
1
2
3
4
5
6
|
from sudodem import plot, _gjkparticle_utils
from sudodem import *
from sudodem._gjkparticle_utils import *
import random as rand
import math
|
Next, define some constants:
1
2
3
4
5
6
7
8
9
|
cube_v0 = [[0,0,0],[1,0,0],[1,1,0],[0,1,0],[0,0,1],[1,0,1],[1,1,1],[0,1,1]]
cube_v = [[i*0.01 for i in j] for j in cube_v0]
isSphere=False
num_x = 5
num_y = 5
num_z = 20
R = 0.01
|
Define a lattice grid:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
#R: distance between two neighboring nodes
#num_x: number of nodes along x axis
#num_y: number of nodes along y axis
#num_z: number of nodes along z axis
#return a list of the postions of all nodes
def GridInitial(R,num_x=10,num_y=10,num_z=20):
pos = list()
for i in range(num_x):
for j in range(num_y):
for k in range(num_z):
x = i*R*2.0
y = j*R*2.0
z = k*R*2.0
pos.append([x,y,z])
return pos
|
Set properties of materials:
1
2
3
4
5
6
7
8
|
p_mat = GJKParticleMat(label="mat1",Kn=1e4,Ks=7e3,frictionAngle=math.atan(0.5),density=2650,betan=0,betas=0) #define Material with default values
#mat = GJKParticleMat(label="mat1",Kn=1e6,Ks=1e5,frictionAngle=0.5,density=2650) #define Material with default values
wall_mat = GJKParticleMat(label="wallmat",Kn=1e4,Ks=7e3,frictionAngle=0.0,betan=0,betas=0) #define Material with default values
wallmat_b = GJKParticleMat(label="wallmat",Kn=1e4,Ks=7e3,frictionAngle=math.atan(1),betan=0,betas=0) #define Material with default values
O.materials.append(p_mat)
O.materials.append(wall_mat)
O.materials.append(wallmat_b)
|
Create the cubic box:
1
2
3
4
5
6
|
# create the box and add it to O.bodies
O.bodies.append(utils.wall(-R,axis=0,sense=1, material = wall_mat))#left wall along x axis
O.bodies.append(utils.wall(2.0*R*num_x-R,axis=0,sense=-1, material = wall_mat))#right wall along x axis
O.bodies.append(utils.wall(-R,axis=1,sense=1, material = wall_mat))#front wall along y axis
O.bodies.append(utils.wall(2.0*R*num_y-R,axis=1,sense=-1, material = wall_mat))#back wall along y axis
O.bodies.append(utils.wall(-R,axis=2,sense=1, material =wallmat_b))#bottom wall along z axis
|
Define engines and set a fixed time step:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
newton=NewtonIntegrator(damping = 0.3,gravity=(0.,0.,-9.8),label="newton",isSuperquadrics=4)
O.engines=[
ForceResetter(),
InsertionSortCollider([Bo1_GJKParticle_Aabb(),Bo1_Wall_Aabb()],verletDist=0.2*0.01),
InteractionLoop(
[Ig2_Wall_GJKParticle_GJKParticleGeom(), Ig2_GJKParticle_GJKParticle_GJKParticleGeom()],
[Ip2_GJKParticleMat_GJKParticleMat_GJKParticlePhys()], # collision "physics"
[GJKParticleLaw()] # contact law -- apply forces
),
newton
]
O.dt=1e-5
|
Polyhedral particles are generated as follows:
1
2
3
4
5
6
7
8
9
10
11
12
|
#generate a sample
def GenSample(r,pos):
for p in pos:
body = GJKPolyhedron([],[1.e-2,1.e-2,1.e-2],0.05*1e-2,p_mat,False)
body.state.pos=p
O.bodies.append(body)
O.bodies[-1].shape.color=(rand.random(), rand.random(), rand.random())
# create a lattice grid
pos = GridInitial(R,num_x=num_x,num_y=num_y,num_z=num_z) # get positions of all nodes
# create particles at each nodes
GenSample(R,pos) #
|
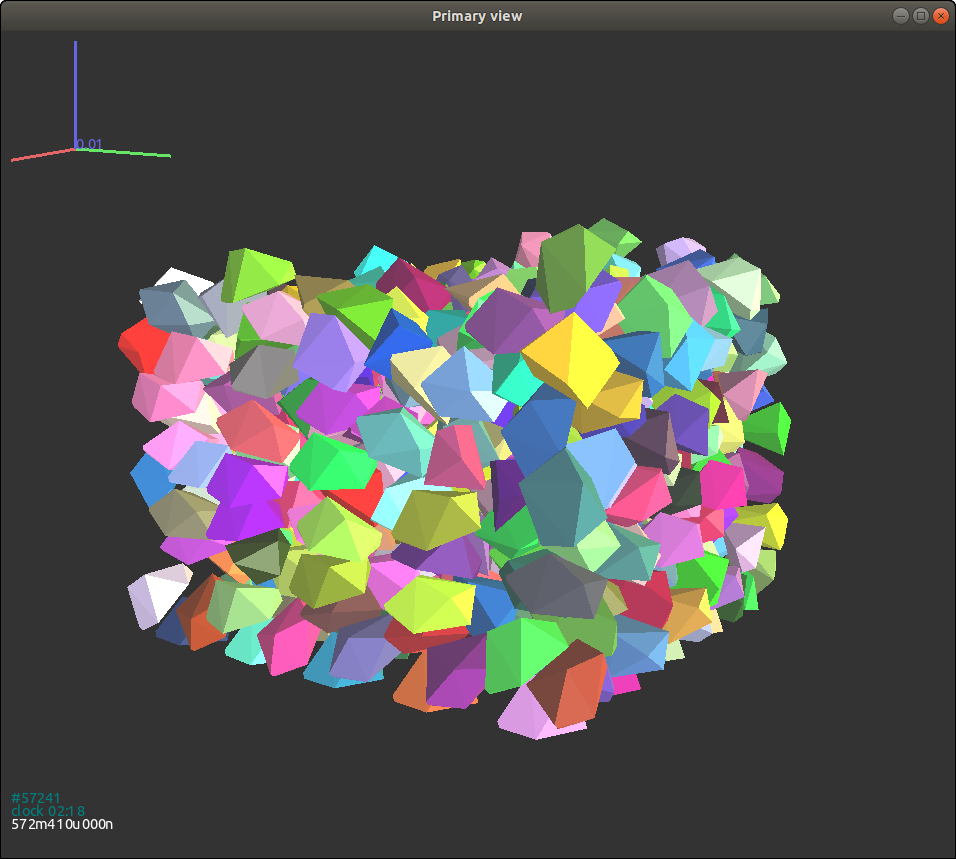 {#figgjkpolyhedron width=“8cm”}
{#figgjkpolyhedron width=“8cm”}
 {#figgjkcone width=“8cm”}
{#figgjkcone width=“8cm”}
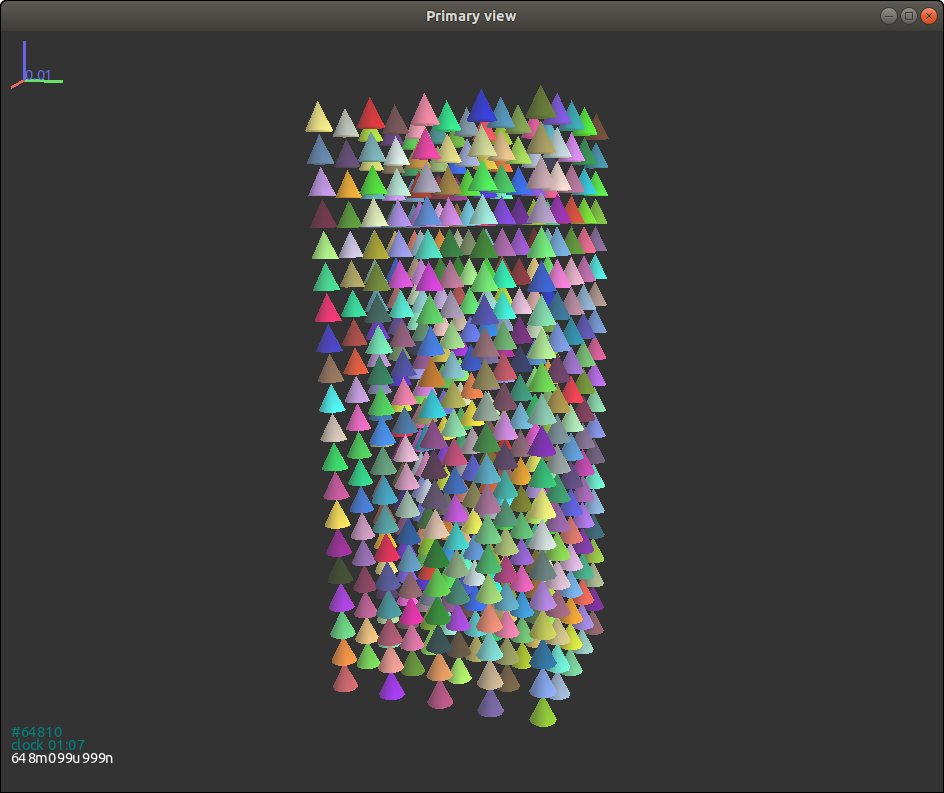
For cones, we change the GenSample functions as follows:
1
2
3
4
5
6
7
|
#generate a sample
def GenSample(r,pos):
for p in pos:
body = GJKCone(0.005,0.01,0.05*1e-2,p_mat, False)
body.state.pos=p
O.bodies.append(body)
O.bodies[-1].shape.color=(rand.random(), rand.random(), rand.random())
|
Fig. 3.12{reference-type=“ref” reference=“figgjkcone”}
shows final packing of cones without random initial orientations (i.e.,
the argument rotate is False). It can be seen that particles still
align in the lattice grid due to no disturbance in the tangential
direction.
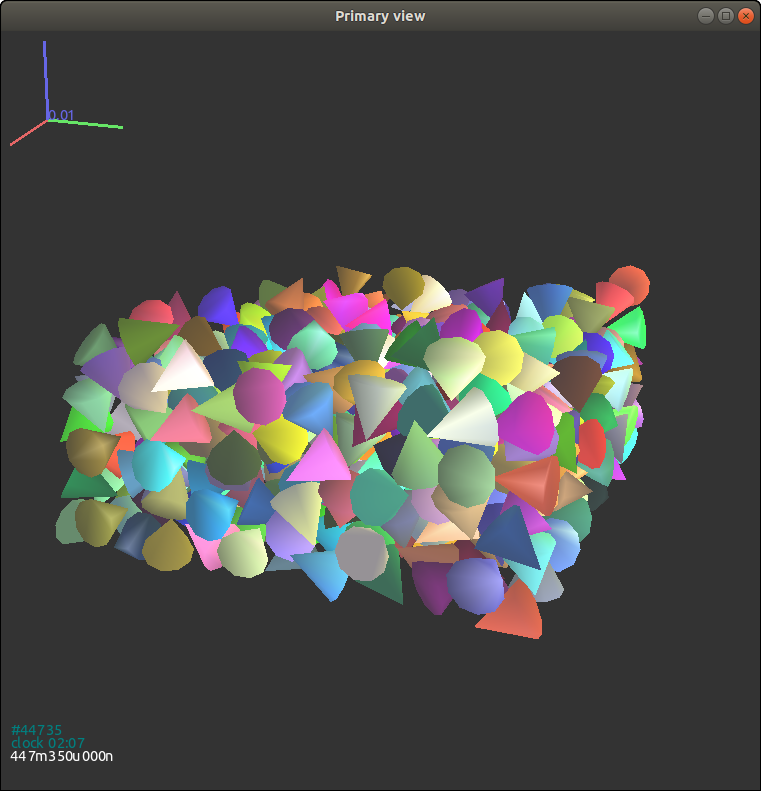
Set the argument rotate to True as follows:
1
|
body = GJKCone(0.005,0.01,0.05*1e-2,p_mat,True)
|
 {#figgjkcone2 width=“8cm”}
{#figgjkcone2 width=“8cm”}
Rerun the simulation, and the initial particles have random
orientations. After free falling under gravity, it can be seen that the
lattice alignment corrupts, referring to Fig.
3.13{reference-type=“ref” reference=“figgjkcone2”}
 {#figgjkcylinder width=“8cm”}
{#figgjkcylinder width=“8cm”}
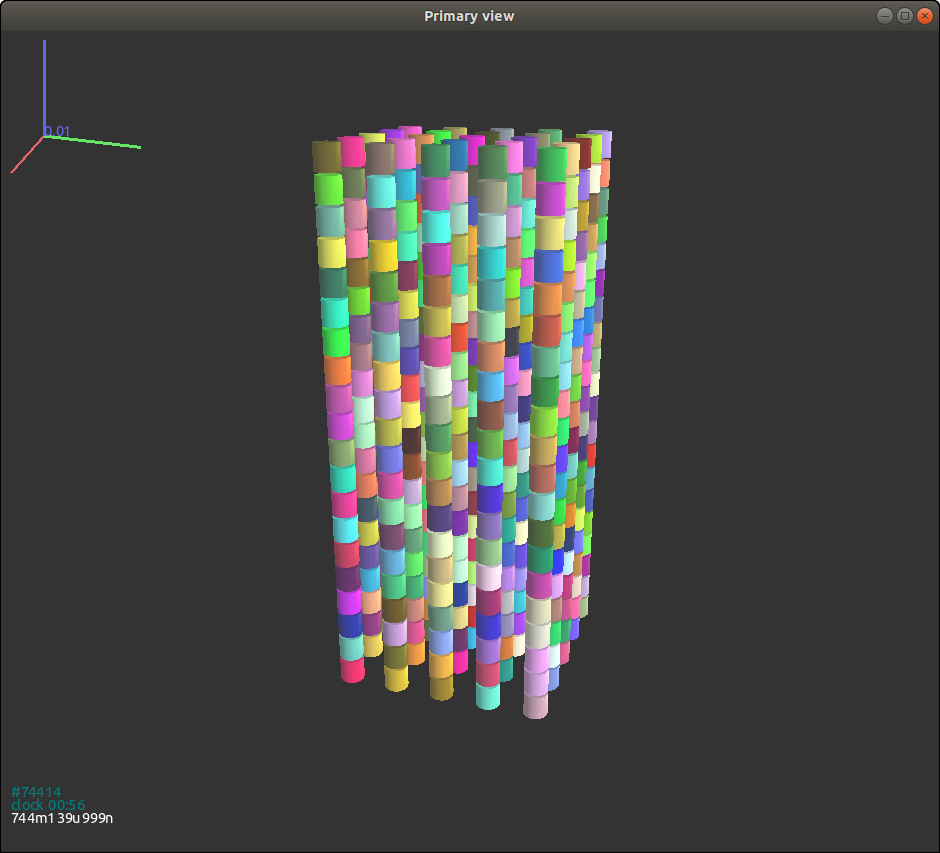
For cylindrical particles, the function GenSample is replaced as
follows:
1
2
3
4
5
6
|
def GenSample(r,pos):
for p in pos:
body = GJKCylinder(0.005,0.01,0.05*1e-2,p_mat,False)
body.state.pos=p
O.bodies.append(body)
O.bodies[-1].shape.color=(rand.random(), rand.random(), rand.random())
|
 {#figgjkcylinder2 width=“8cm”}
{#figgjkcylinder2 width=“8cm”}
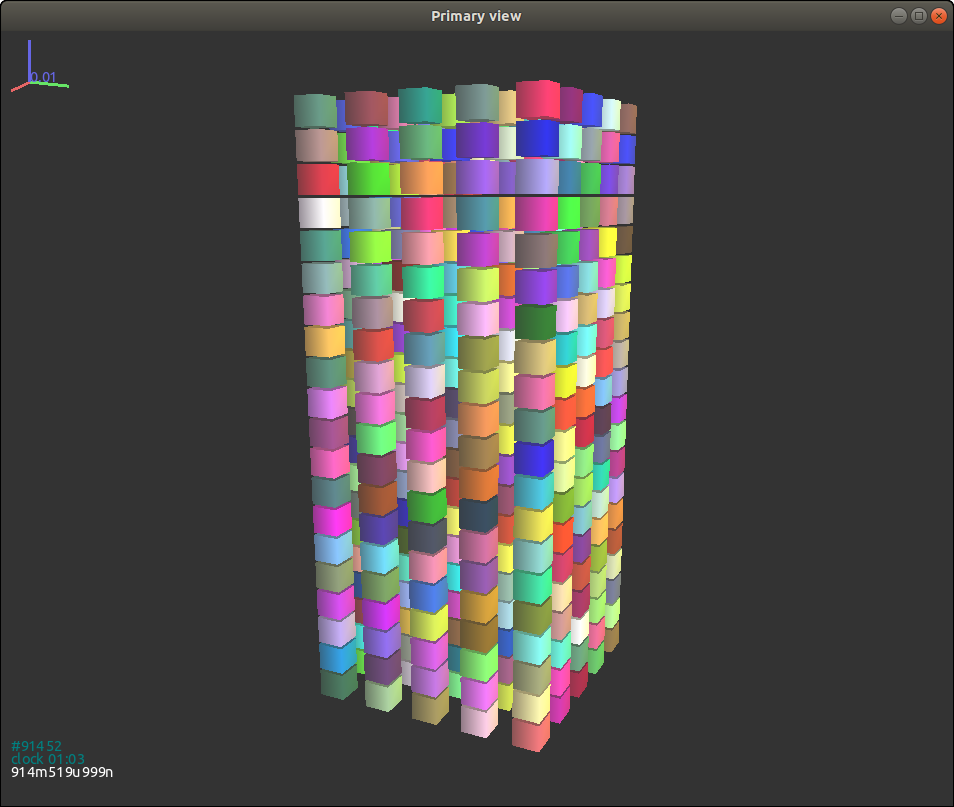
Rerun the simulation, we obtain final packing of cylindrical particles
as shown in Fig. 3.14{reference-type=“ref”
reference=“figgjkcylinder”}, where it is evident that all particles stay
in a lattice grid after free falling. Again, we reset the argument
rotate to True so that all initial particles will have random
orientations.
1
|
body = GJKCylinder(0.005,0.01,0.05*1e-2,p_mat,True)
|
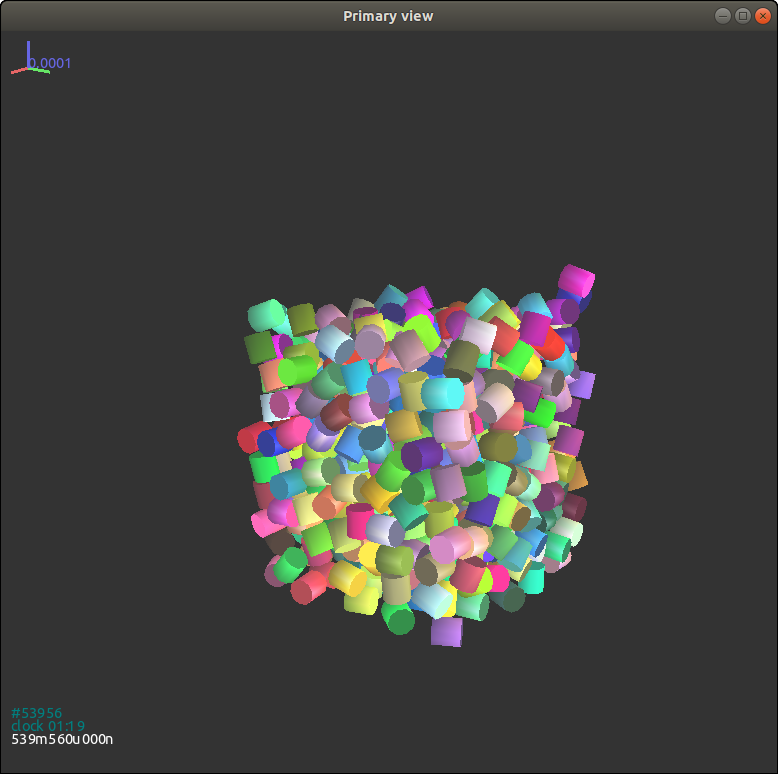
Rerun the simulation again, the column of cylindrical particles collapse
into the cubic box. The final state is visualized in Fig.
3.15{reference-type=“ref”
reference=“figgjkcylinder2”}.
 {#figgjkcuboid width=“8cm”}
{#figgjkcuboid width=“8cm”}
 {#figgjkcuboid2 width=“8cm”}
{#figgjkcuboid2 width=“8cm”}
We then continue two more simulations of cuboids. Change the function
GenSample as follows:
1
2
3
4
5
6
7
|
#generate a sample
def GenSample(r,pos):
for p in pos:
body = GJKCuboid([0.005,0.005,0.005],0.05*1e-2,p_mat,False)
body.state.pos=p
O.bodies.append(body)
O.bodies[-1].shape.color=(rand.random(), rand.random(), rand.random())
|
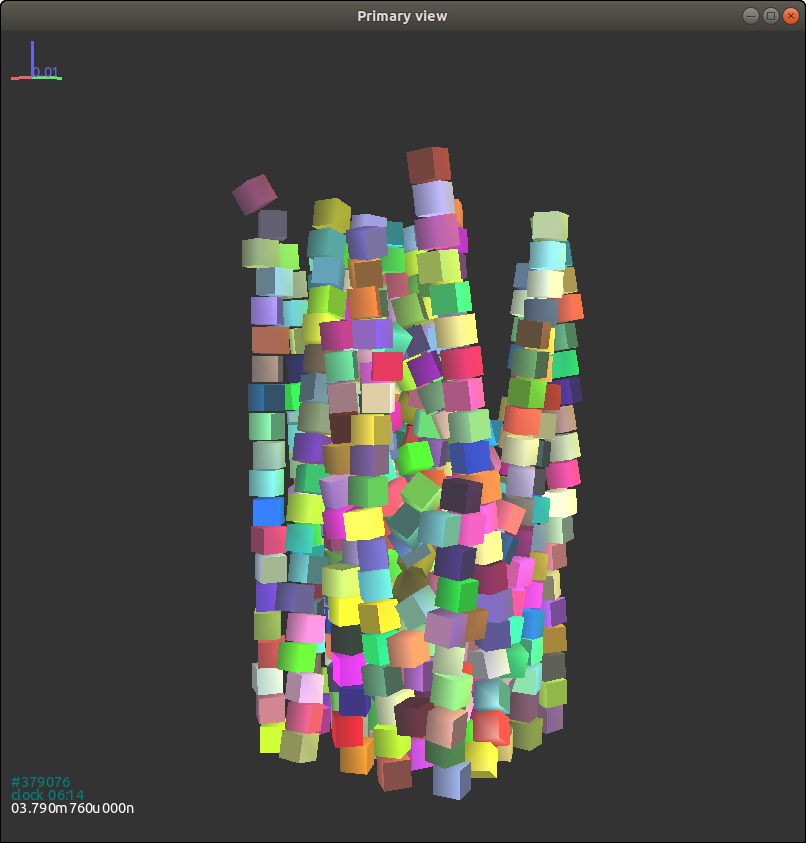
We obtain the final packing of cuboids without initial random
orientations as shown in Fig. 3.16{reference-type=“ref”
reference=“figgjkcuboid”}. Again, the alignment of particles remains a
lattice form. Rerun the simulation with the argument rotate setting to
True as follows:
1
|
body = GJKCuboid([0.005,0.005,0.005],0.05*1e-2,p_mat,True)
|
The column of particles collapses but not too much due to small gaps
between particles.