我们希望如下的几个例子可以帮助用户迅速开始 SudoDEM 的学习, 例子对应的脚本可从以下 github 仓库下载:
示例
我们给出了六个例子以期可以帮助新用户开始 SudoDEM 的学习。
- 1: 示例 0: 运行一个简单的模拟
- 2: 示例 1: 超级椭球堆积模拟
- 3: 示例 2: 超级椭球三轴试验模拟
- 4: 示例 3: GJK颗粒的堆积模拟
- 5: 示例 4: 组合超级椭球的堆积模拟
- 6: 示例 5: 超椭圆堆积模拟
1 - 示例 0: 运行一个简单的模拟
该示例模拟了一个自由落体的球体掉在地面的过程
该例子对应的 Python 脚本名字为: ‘example0.py’, 你可以选择把该例子的工作路径设置为 (例如, /home/xxx/example')。
打开命令行并键入 ‘sudodem3d example0.py’ 来运行该例子。如果当前命令行路径不在例子工作路径下,你可能需要输入相对路径来指向正确的例子所处文件夹。
‘example0.py’ 例子脚本如下:
|
|
在命令行中键入以下命令来运行脚本
sudodem3d example0.py
多线程运行(例如, 使用2个线程 [^4])
sudodem3d -j2 example0.py
运行时所保存的数据如下所示:
iter, x, y, z
10000 0.0 0.0 9.95588676912
20000 0.0 0.0 9.82357353912
30000 0.0 0.0 9.60306030912
40000 0.0 0.0 9.29434707912
50000 0.0 0.0 8.89743384912
60000 0.0 0.0 8.41232061912
70000 0.0 0.0 7.83900738912
用户可以使用 gnuplot 来快速可视化模拟结果 (gnuplot 可通过在命令行键入以下命令来完成安装):
sudo apt install gnuplot
下图所示了 gnuplot 可视化的计算结果 3.1{reference-type=“ref” reference=“figsinglesp”}:
$> gnuplot
gnuplot> plot 'data.dat' using ($1/10000):4; set xlabel 'iterations [x10000]'; set ylabel 'position z [m]'
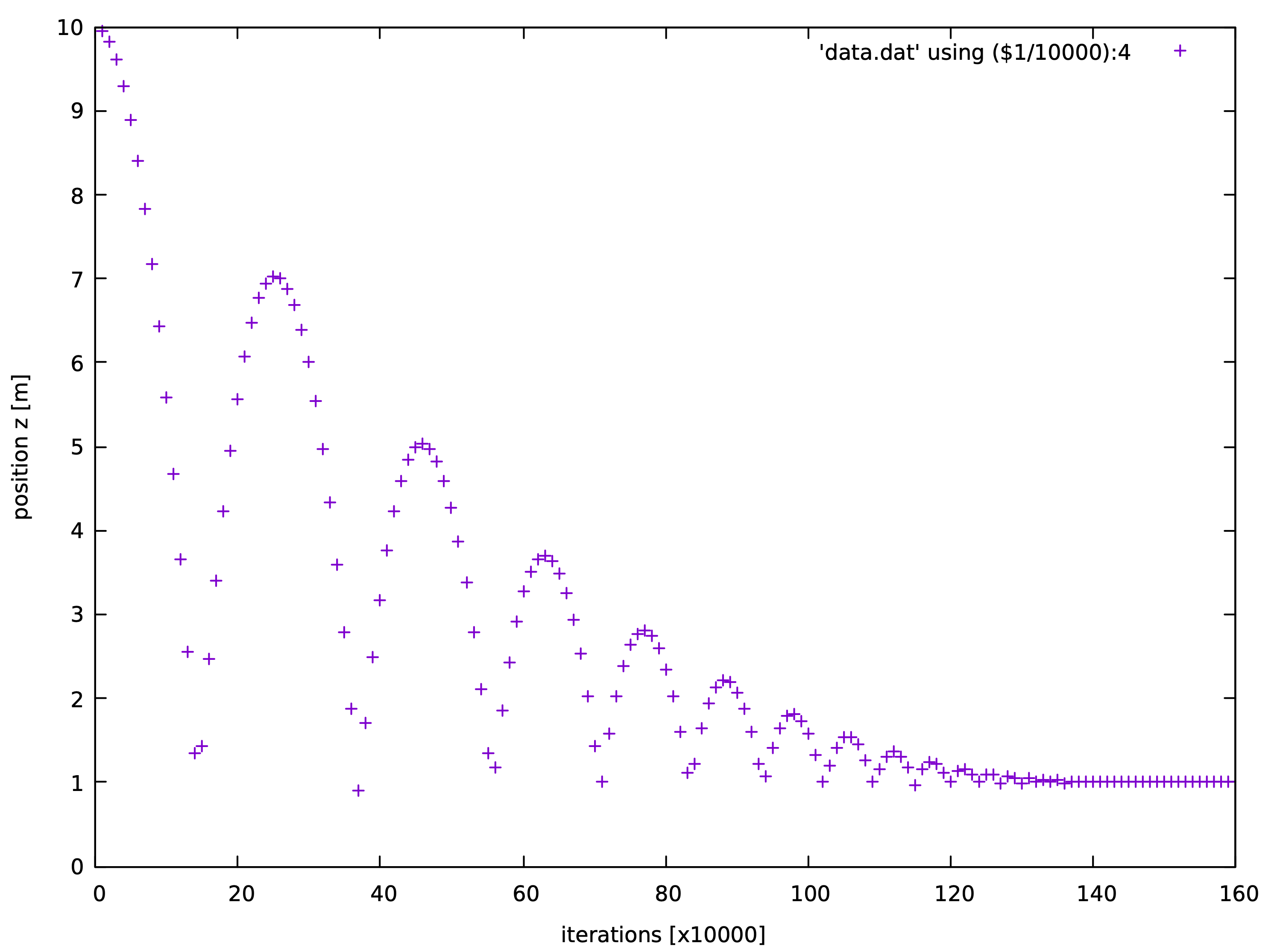
球体自由落体到地面的z方向坐标变化。
2 - 示例 1: 超级椭球堆积模拟
该示例给出了超级椭球的堆积模拟
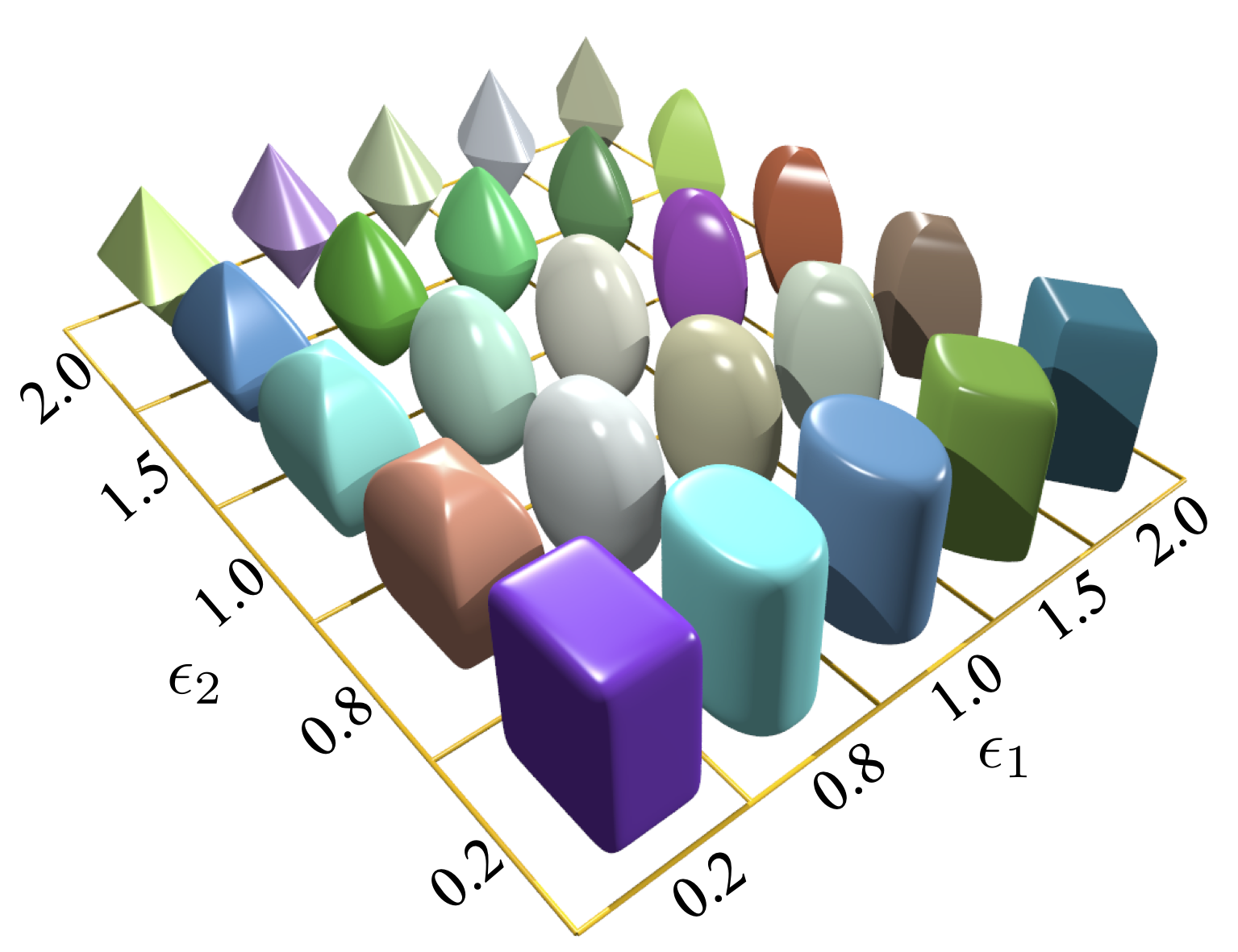
超级椭球局部坐标下的形状函数可由下式给出 $$\label{eqsurface} \Big(\big|\frac{x}{r_x}\big|^{\frac{2}{\epsilon_1}} + \big|\frac{y}{r_y}\big|^{\frac{2}{\epsilon_1}}\Big)^{\frac{\epsilon_1}{\epsilon_2}} + \big|\frac{z}{r_z}\big|^{\frac{2}{\epsilon_2}} = 1$$ 其中 $r_x, r_y$ 和 $r_z$ 是超级椭球在x, y, z轴的半长主轴; and $\epsilon_i (i=1,2)$ 是刻画颗粒棱角度的形状参数. $\epsilon_i$ 在 0 到 2 的变化可勾勒出非常丰富的凸超级椭球形状。SudoDEM 生成超级椭球的两个函数可参见如下高亮描述 (see Sec. 5.1.2{reference-type=“ref” reference=“modsuperquadrics”}):
-
NewSuperquadrics2($r_x$, $r_y$, $r_z$, $\epsilon_1$, $\epsilon_2$, mat, rotate, isSphere)
-
NewSuperquadrics_rot2($r_x$, $r_y$, $r_z$, $\epsilon_1$, $\epsilon_2$, mat, $q_w$, $q_x$, $q_y$, $q_z$, isSphere)
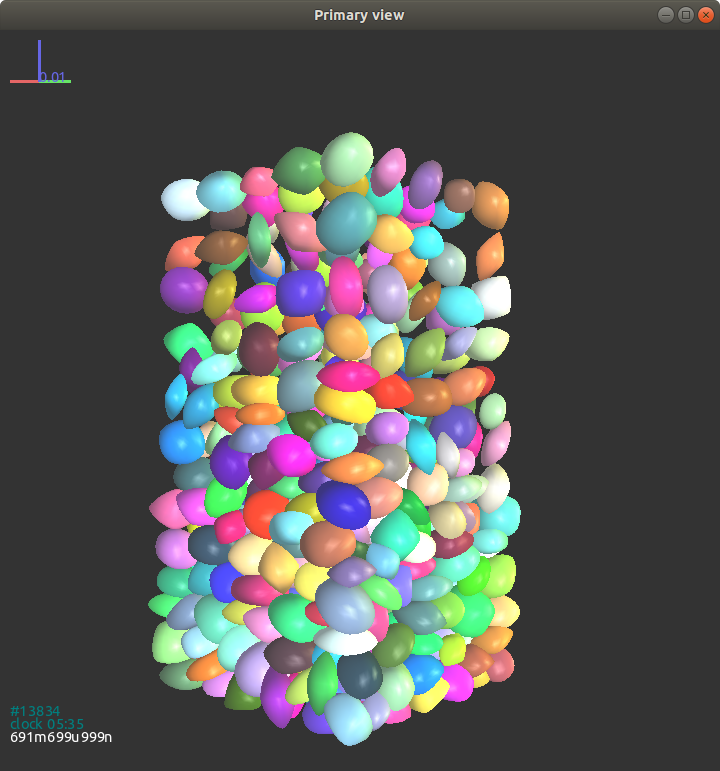
超级椭球。
这里我们给出了超级椭球在立方体盒子中重力堆积的模拟示例。
|
|
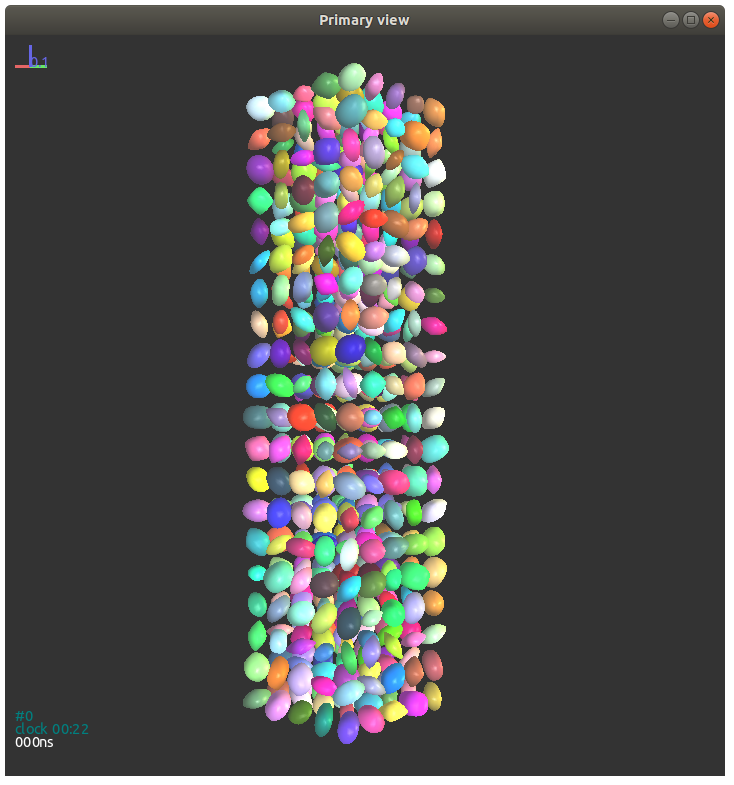
在GUI控制面板中我们可以通过点击 ‘show 3D’ 按钮来显示模拟的可视化场景。在显示模式下选择 ‘Gl1_Superquadrics’ 渲染器来控制颗粒是由线条还是由实体面来渲染(如图), 3.3{reference-type=“ref” reference=“figguidisplay”}.
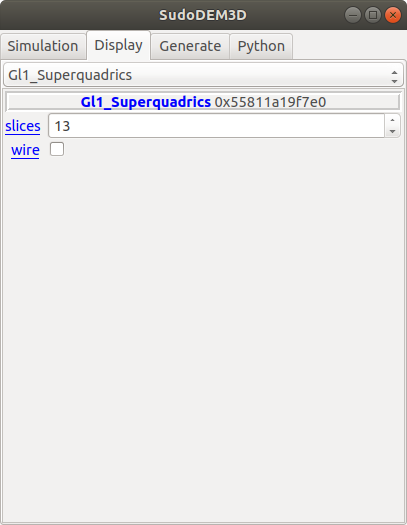
Figs. 3.4{reference-type=“ref” reference=“figexp11”} - 3.6{reference-type=“ref” reference=“figexp13”} 显示了在不同渲染模式下的超级椭球颗粒。
超级椭球颗粒的属性和类方法展示如下:
-
属性:
-
$r_x$, $r_y$, $r_z$: 浮点型, x, y, 和 z 轴的半长轴。
-
$\epsilon_1$, $\epsilon_2$: 浮点型, 材料参数。
-
isSphere: 布尔值, 颗粒是否是球体.
-
-
类方法:
-
getVolume(): 浮点型, 返回颗粒体积。
-
getrxyz(): 三阶向量, 返回颗粒的三个半长轴。
-
geteps(): 二阶向量, 返回颗粒的形状参数eps1和eps2。
-
如下代码给出了获取索引为100的超级椭球的体积:
volume = O.bodies[100].shape.getVolume()
获取对象所有属性的方法如下:
O.bodies[100].dict()
输出如下:
{'bound': <Aabb instance at 0x56072ec83da0>,
'chain': -1,
'clumpId': -1,
'flags': 3,
'groupMask': 1,
'id': 100,
'iterBorn': 0,
'material': <SuperquadricsMat instance at 0x56072e6ed5f0>,
'shape': <Superquadrics instance at 0x56072ec83b60>,
'state': <State instance at 0x56072ec839e0>,
'timeBorn': 0.0}
我们可以看到对象的属性是以字典的方式被打印出来的。需要提及的是尖括号内的是另一个对象的指针,也就是说我们可以通过dict()方法来进一步获取其对应的属性。例如我们要获取颗粒state的属性,可以通过如下代码:
O.bodies[100].state.dict()
输出如下:
{'angMom': Vector3(0,0,0),
'angVel': Vector3(0,0,0),
'blockedDOFs': 0,
'densityScaling': 1.0,
'inertia': Vector3(0.0045389863901528615,0.007287422614611933,
0.0067053718092146865),
'isDamped': True,
'mass': 3.225715855242557,
'refOri': Quaternion((1,0,0),0),
'refPos': Vector3(0,0,0),
'se3': (Vector3(0,0.8,3),
Quaternion((0.3970010520699211,0.5339678220536823,
-0.7465042060609055),2.1754719537556495)),
'vel': Vector3(0,0,0)}
对于 Shape对象, 它的属性输出可能随着子类的不同而不同。
O.bodies[100].shape.dict()
输出如下:
{'color': Vector3(0.6407663308273844,0.07426042997942327,
0.05872324344642611),
'eps': Vector2(1.3975848801318045,1.5376309088540607),
'eps1': 1.3975848801318045,
'eps2': 1.5376309088540607,
'highlight': False,
'isSphere': False,
'rx': 0.1,
'rxyz': Vector3(0.1,0.06469580193313924,0.07572423080016706),
'ry': 0.06469580193313924,
'rz': 0.07572423080016706,
'wire': False}
这里我们给出了一个例子用来获取所有超级椭球的序号及其位置信息:
for b in O.bodies: # loop all bodies in the simulation
# we have to check if the present body is a superellipsoid or others, e.g., a wall
if isinstance(b.shape, Superquadrics): # if it is a superellipsoid, then to do
pid = b.id # get the id of particle b
pos = b.state.pos # get the position of particle b
print pid, pos
3 - 示例 2: 超级椭球三轴试验模拟
该示例给出了超级椭球的三轴试验模拟
该例子给出了超级椭球的三轴固结及压缩试验模拟。该模拟使用 CompressionEngine 引擎来完成, 同时用户可通过 PyRunner 引擎来自定义 CompressionEngine 引擎。固结和压缩引擎的基本设置如下:
-
固结
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15triax=CompressionEngine( goalx = 1.0e5, # 围压 100 kPa goaly = 1.0e5, goalz = 1.0e5, savedata_interval = 10000, echo_interval = 2000, continueFlag = False, max_vel = 100.0, gain_alpha = 0.5, f_threshold = 0.01, fmin_threshold = 0.01, #偏应力与平均应力的比值 unbf_tol = 0.01, #不平衡力比值 file='record-con' )-
goalx = goaly = goalz = 围压
-
savedata_interval: 保存模拟信息 (轴应变,体应变,平均应力和偏应力) 到文件的DEM时步周期,在固结引擎中该选项已被弃用。
-
echo_interval: 显示模拟信息 (时步, 不平衡力比值, 各个方向的应力) 到命令行的DEM时步周期。
-
continueFlag: 用来表示继续固结或压缩的保留关键字。
-
max_vel: 墙体最大移动速度,可在固结时用于限制墙体的移动。
-
gain_alpha $\alpha$: 用来控制墙体下一步的移动速度。 $$v_w = \alpha \frac{f_w - f_g}{\Delta t \sum k_n}$$ 其中, $v_w$ 表示墙体在下一时步的移动速度; $f_w$ 和 $f_g$ 分别表示当前和目标接触力; $\Delta t$ 表示时步; $\sum k_n$ 表示墙体和所有接触颗粒的接触刚度之和。
-
f_threshold $\alpha_f$: 归一化的接触力偏离比值, 即, $$\alpha_f = \frac{|f_w-f_g|}{f_g}$$
-
fmin_threshold $\beta_f$: 偏应力 $q$ 和平均主应力 $p$ 的比值, 即, $$\beta_f = \frac{q}{p},\quad p= \frac{\sigma_{ii}}{3},\quad q=\sqrt{\frac{3}{2}\sigma_{ij}^{'}\sigma_{ij}^{'}}$$ $$\sigma_{ij} = \frac{1}{V}\sum_{c\in V}f_i^cl_j^c,\quad \sigma_{ij}^{'}=\sigma_{ij}-p\delta_{ij}$$ 其中 $\sigma_{ij}$ 表示颗粒集合体的应力张量, $\sigma_{ij}^{'}$ 表示应力张量的偏应力部分; $V$ 表示试样体积; $f^c$ 和 $l^c$ 分别表示接触 $c$ 的接触力和接触支向量; $\delta_{ij}$ 表示克罗纳克尔。
-
unbf_tol $\gamma_f$: 表示不平衡力比值,由下式给出 $$\gamma_f = \frac{\sum\limits_{B_i\in V} |\sum\limits_{j\in B_i}f^c_j+f^b_j|}{2\sum\limits_{c\in V}|f^c|}$$ 需要说明的是只有当 $\alpha_f$, $\beta_f$ 和 $\gamma_f$ 都达到设定值,固结过程才会结束。
-
file: 模拟信息输出的文件相关信息
-
-
压缩
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16triax=CompressionEngine( z_servo = False, goalx = 1.0e5, goaly = 1.0e5, goalz = 0.01, ramp_interval = 10, ramp_chunks = 2, savedata_interval = 1000, echo_interval = 2000, max_vel = 10.0, gain_alpha = 0.5, file='sheardata', target_strain = 0.4, gain_alpha = 0.5 )-
z_servo: 布尔值,用来控制z方向是应变加载还是应力加载,在应变加载状态下 goalz 是对应的应变加载速率。
-
ramp_interval: 逐级加载到稳定应变速率的时步。该变量用来模拟实际试验中逐级稳定加载的过程,用户可以通过设定一个很小的值来忽略这个变量的影响。
-
ramp_chunks: 逐级加载到稳定应变速率的区间数。与 ramp_interval 类似,用户可以通过设定较小值来忽略它的影响。
-
target_strain: 加载目标应变 (对数应变),在应变达到该值的时候剪切模拟停止。
注: 如果用户需要进行准静态的三轴剪切模拟,剪切速率要低于一定的阈值。特别地,我们使用加载惯性系数来表征加载的准静态性, 即当惯性系数 $I$ 低于 $10^{-3}$时可视为准静态剪切,其中惯性系数由下式给出 $$I = \dot{\epsilon_1}\frac{\hat{d}}{\sqrt{\sigma_0/\rho}}$$ 其中 $\dot{\epsilon_1}=\mathrm{d}\epsilon_1/\mathrm{d}t$ 表示剪切应变加载速率; $\hat{d}$ 和 $\rho$ 分别表示颗粒的平均直径和平均密度, $\sigma_0$ 表示围压。
-
我们这里给出了一个三轴剪切加载的例子作为参考:
|
|
命令行将会有如下信息显示
calm procedure is over
0 particles are deleted!
consolidation begins
Iter 50000 Ubf 0.483161, Ss_x:9.67986e-05, Ss_y:4.15364e-05, Ss_z:6.1184e-05, e:0.992618
Iter 52000 Ubf 0.461741, Ss_x:1.2412, Ss_y:1.06812, Ss_z:1.10116, e:0.854445
Iter 54000 Ubf 0.263699, Ss_x:1.75334, Ss_y:1.98567, Ss_z:1.62181, e:0.757469
Iter 56000 Ubf 0.118329, Ss_x:3.06302, Ss_y:3.54818, Ss_z:3.22986, e:0.679106
Iter 58000 Ubf 0.0110747, Ss_x:22.0177, Ss_y:21.3303, Ss_z:21.3485, e:0.614824
Iter 60000 Ubf 0.000577066, Ss_x:91.4199, Ss_y:89.6039, Ss_z:89.1057, e:0.58984
Iter 62000 Ubf 0.000128293, Ss_x:100.012, Ss_y:99.7251, Ss_z:99.6123, e:0.587807
consolidation completed!
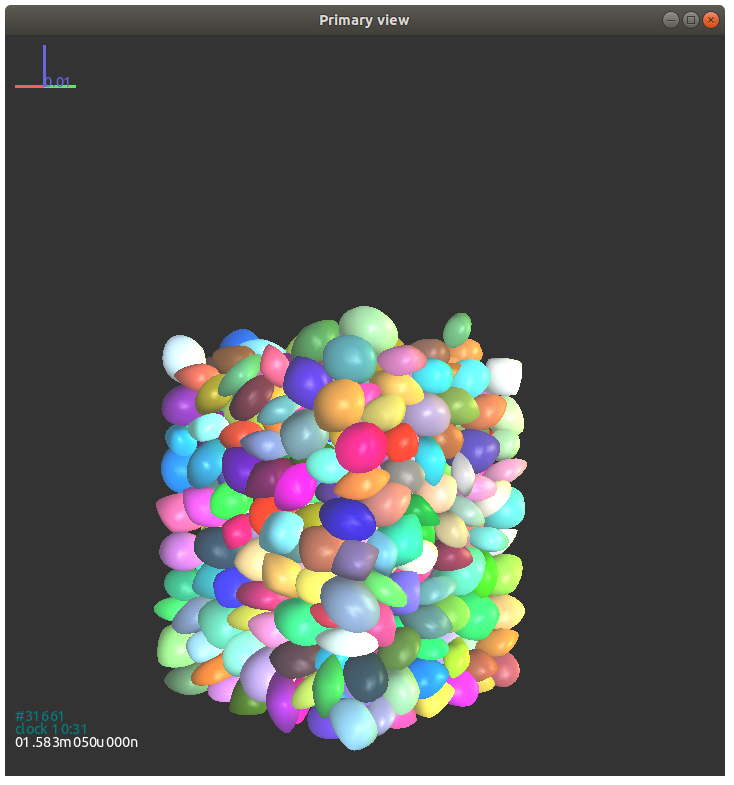
固结完成后 (如图 Fig. [3.7] 所示,(#figex2consol){reference-type=“ref” reference=“figex2consol”}), 我们可以保存固结完成后的颗粒状态到文件中
|
|
然后我们开始对固结后的试样进行剪切,参见下面的脚本:
|
|
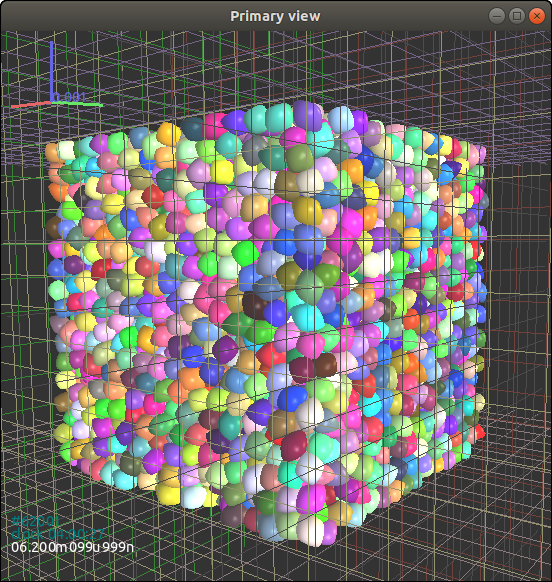
试样的剪切加载总应变为40%,剪切终止时的试样状态如图所示 Fig. 3.8{reference-type=“ref” reference=“figex2shear”}.
试样在剪切阶段的宏观力学响应可以用应力张量来表征,该张量由下式子得到: $$\label{eqDEMstress} \sigma_{ij} = \frac{1}{V} \sum_{c \in V} f_i^c l_j^c$$ 其中 $V$ 表示试样总体积; $f^c$ 表示接触 $c$ 的接触力矢量; $l^c$ 表示接触对应的支向量,也就是连接接触两颗粒质心的矢量。 平均主应力 $p$ 和偏应力 $q$ 被定义为: $$p = \frac{1}{3}\sigma_{ii},\quad q = \sqrt{\frac{3}{2} \sigma_{ij}^{'}\sigma_{ij}^{'}}$$ 其中 $\sigma_{ij}^{'}$ 表示应力张量的偏应力部分 $\sigma_{ij}$.
考虑到立方体试样的加载是由六个刚性墙来伺服控制的,轴向应变 $\epsilon_z$ 和 体应变 $\epsilon_v$ 可以由墙体的位置近似的给出, 即, $$\epsilon_z = \int_{H_0}^{H}\frac{\mathrm{d}h}{h}=-\ln\frac{H_0}{H},\quad \epsilon_v = \epsilon_x+\epsilon_y+\epsilon_z=\int_{V_0}^{V}\frac{\mathrm{d}v}{v}=-\ln\frac{V_0}{V}$$ 其中 $H$ 和 $V$ 分别表示剪切状态下的墙体高度和体积, $H_0$ 和 $V_0$ 表示刚性强初始状态的高度和体积。 体应变正值表示试样的剪胀状态。
剪切过程的数据保存格式如下:
AxialStrain VolStrain meanStress deviatorStress
0.000511000266 0.000490480823 106090.98 15931.56
0.003011001516 0.002450117535 131061.41 85718.91
0.005511002766 0.003867756447 148076.65 131980.95
0.008011004016 0.004825115794 159924.28 163706.90
0.010511005266 0.005409561745 168606.27 186520.14
0.013011006516 0.005673777079 175131.53 203243.28
0.015511007766 0.005650846281 180293.19 216248.17
0.018011009016 0.005393122254 184581.23 227010.23
进而我们可以绘制出三轴剪切过程的应力-应变曲线以及应力路径曲线,如图所示 Figs. 3.9{reference-type=“ref” reference=“figex2shearstress”} and 3.10{reference-type=“ref” reference=“figex2shearpath”}.
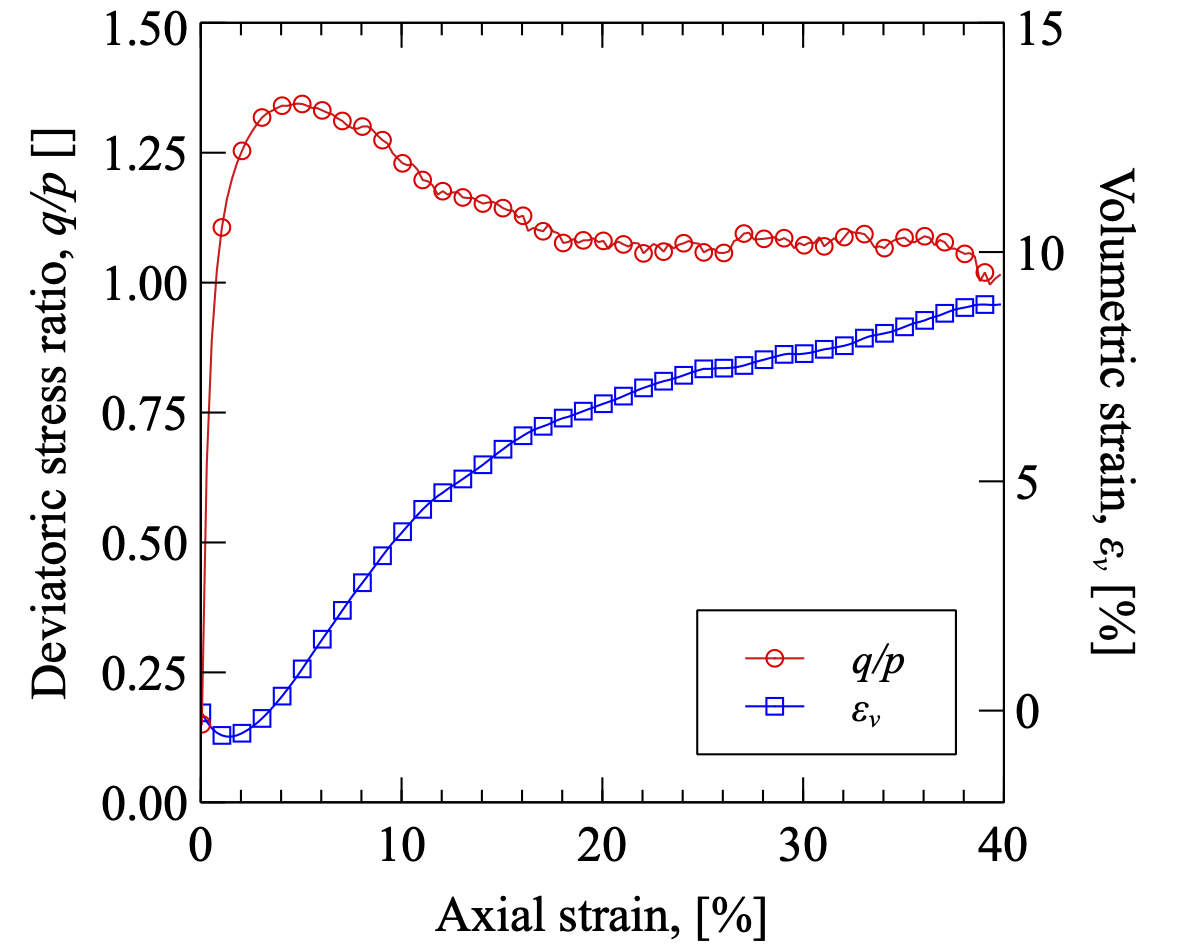
剪切过程中的应力应变曲线以及体应变曲线。
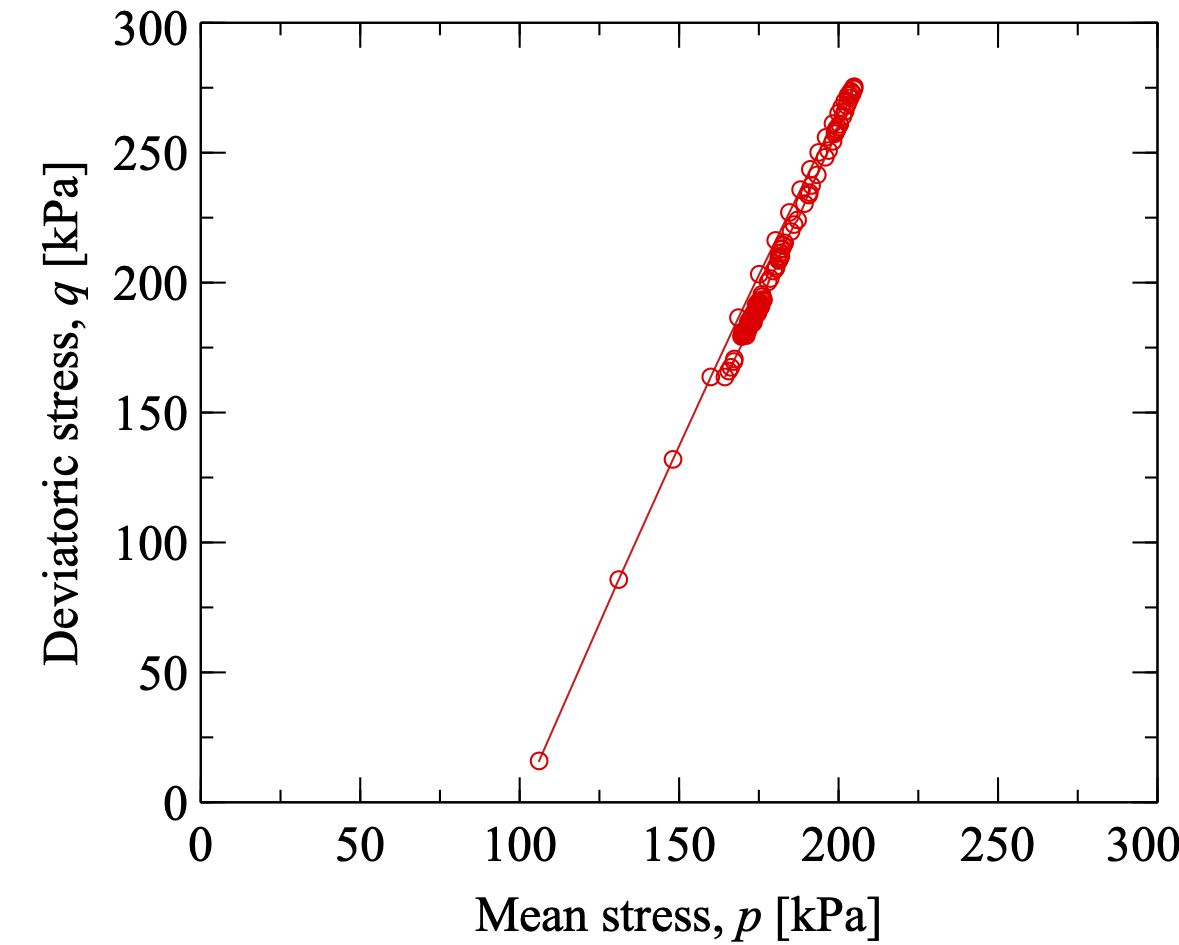
剪切过程中的应力路径变化。
在剪切过程中,试样状态会不断地被保存在文件中,(例如, "shearxxx.xml.bz2") 用于随后的后处理,比如我们可以利用试样加载的元数据来获得试样的配位数和组构等信息。
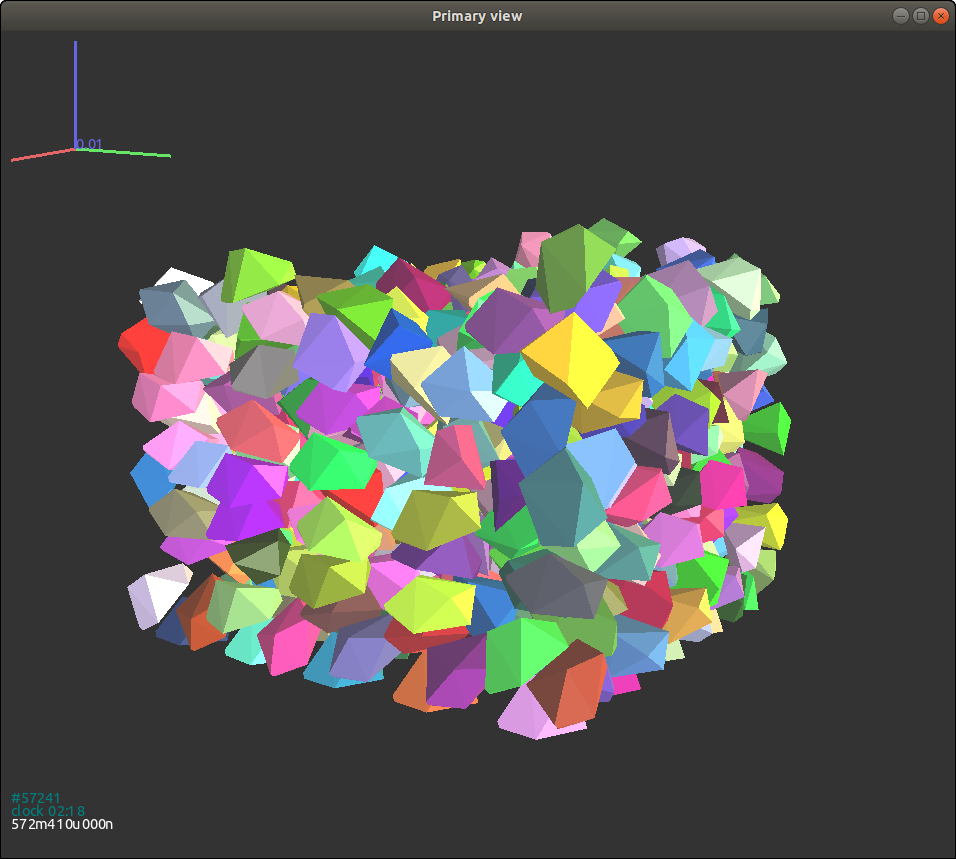
4 - 示例 3: GJK颗粒的堆积模拟
该示例用于GJK颗粒的堆积过程模拟
SudoDEM 中有五种颗粒它们的接触检测算法是用GJK算法实现的,即球体,多面体,圆锥体,圆柱体以及立方体[^5], 我们我们采用GJK颗粒来统一的归类如上颗粒。对应的,Python脚本中该颗粒可以用以下包来导入 _gjkparticle_utils (see Sec. 5.1.3{reference-type=“ref” reference=“modgjkparticle”}), 这五种颗粒的构造函数如下所示:
-
GJKSphere(radius,margin,mat)
-
GJKPolyhedron(vertices,extent,margin,mat, rotate)
-
GJKCone(radius, height, margin, mat, rotate)
-
GJKCylinder(radius, height, margin, mat, rotate)
-
GJKCuboid(extent, margin,mat, rotate)
注: 每个颗粒都被放大了一定的倍数用于加速颗粒接触检测算法,该放大倍数要足够大用以保证颗粒颗粒在较小尺度下可以发生接触, 同时该放大倍数要足够小,以避免颗粒形状的过度失真。
与示例1类似, 我们将会模拟GJK颗粒在立方体盒子中的自由落体堆积过程。进行模拟前,我们需要先导入如下包:
|
|
定义生成颗粒的参数信息:
|
|
定义颗粒生成栅格:
|
|
设置材料属性
|
|
生成立方体盒子
|
|
生成模拟引擎并设置固定时步:
|
|
多面体颗粒生成如下所示:
|
|
 {#figgjkpolyhedron width=“8cm”}
{#figgjkpolyhedron width=“8cm”}
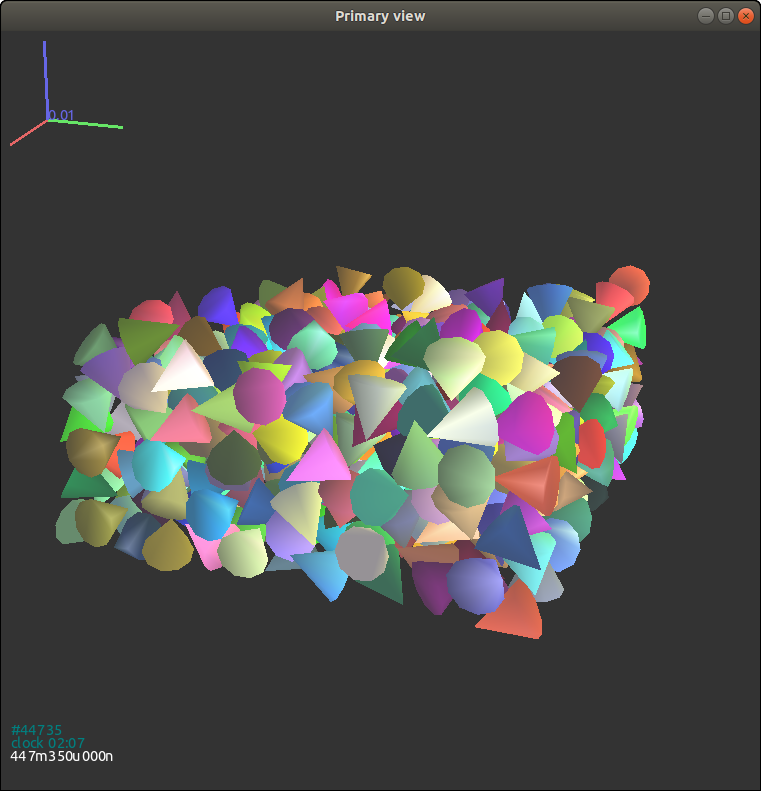
 {#figgjkcone width=“8cm”}
{#figgjkcone width=“8cm”}
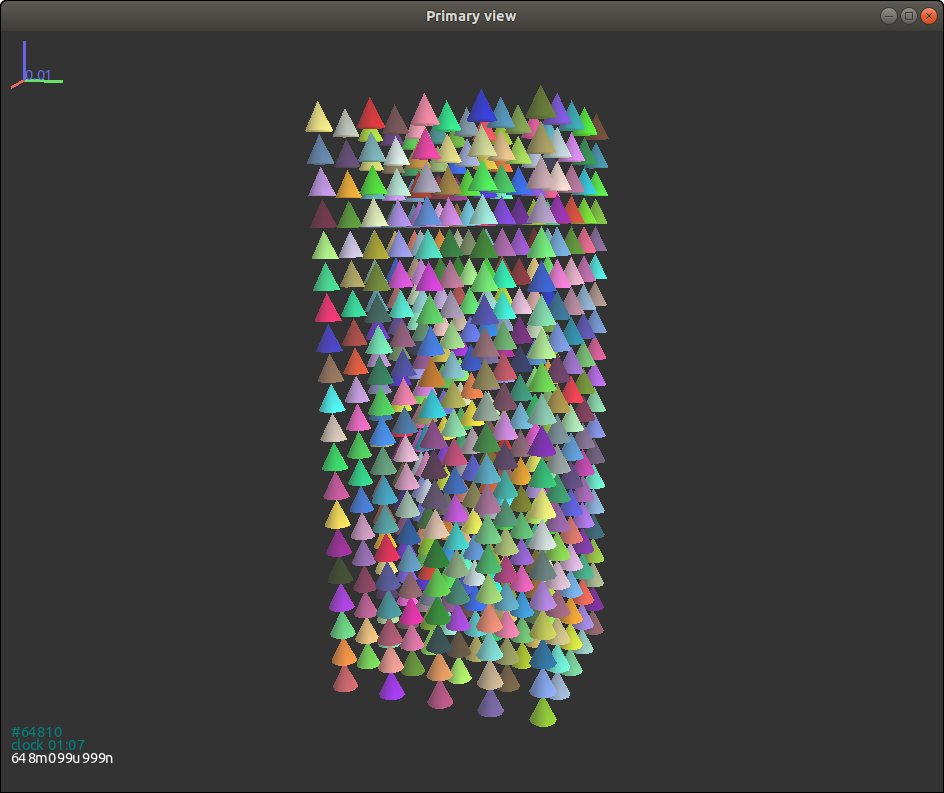
对于圆锥体来说函数 GenSample 需做如下改动:
|
|
Fig. 3.12{reference-type=“ref” reference=“figgjkcone”} 给出了固定初始朝向的圆锥体试样 (通过将变量 rotate 设置为 False 来取消随机的初始朝向生成)。 可以看到所有颗粒的初始状态都是完全相同的。
用户可以尝试将变量 rotate 设置为 True 来测试下随机初始朝向的颗粒试样:
|
|
 {#figgjkcone2 width=“8cm”}
{#figgjkcone2 width=“8cm”}
如图所示,自由落体过程破坏了颗粒非常一致的初始朝向分布: 3.13{reference-type=“ref” reference=“figgjkcone2”}
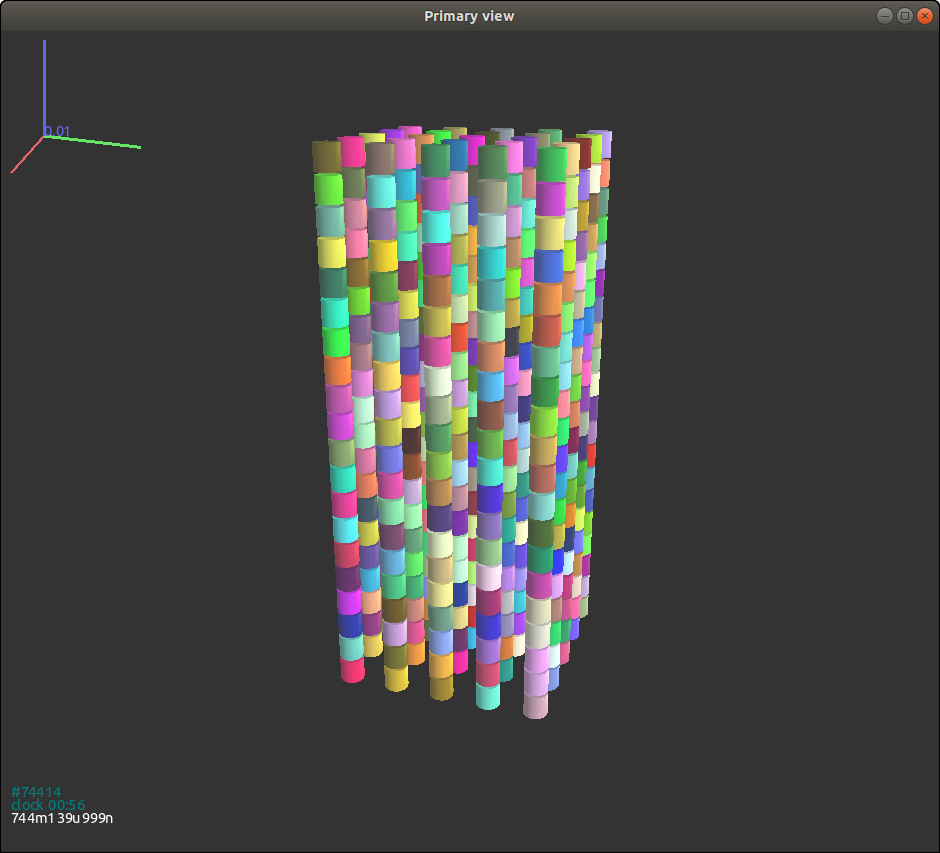 {#figgjkcylinder width=“8cm”}
{#figgjkcylinder width=“8cm”}
圆柱的生成函数 GenSample 改动如下:
|
|
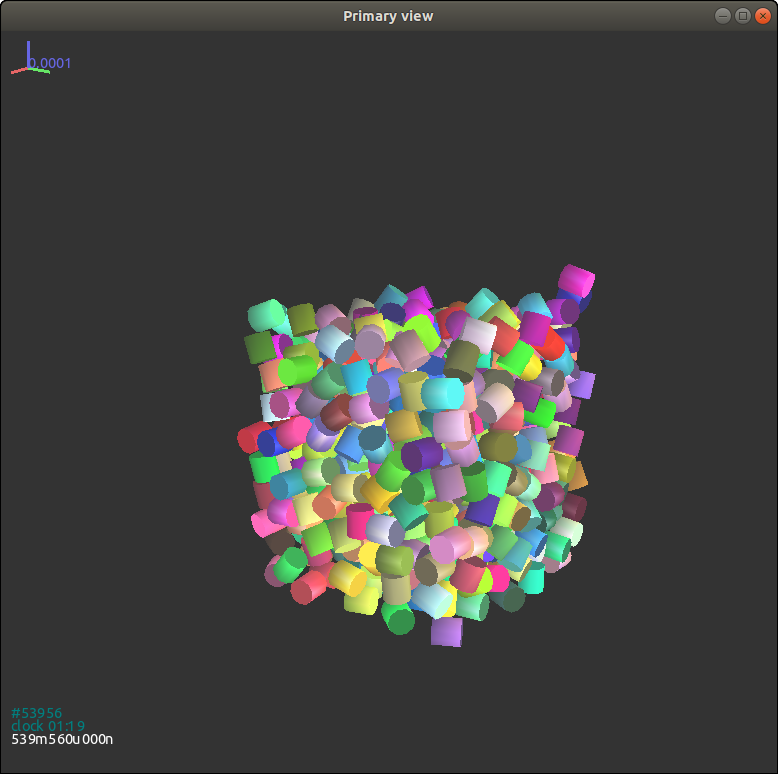 {#figgjkcylinder2 width=“8cm”}
{#figgjkcylinder2 width=“8cm”}
不出意料,对于初始朝向一致的圆柱颗粒,即使是在自由落体后,它们的朝向仍然不变 Fig. 3.14{reference-type=“ref” reference=“figgjkcylinder”}。但是当初始朝向是随机生成时,自由落体结束后的圆柱体朝向变得不规律起来 3.15{reference-type=“ref” reference=“figgjkcylinder2”}。
|
|
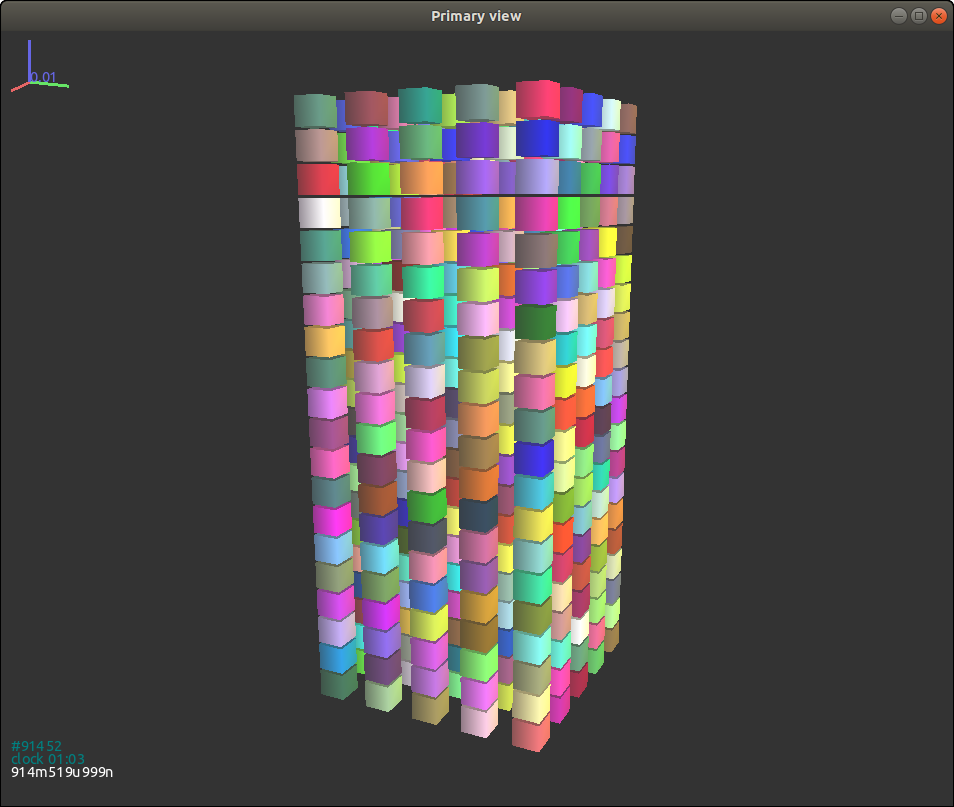 {#figgjkcuboid width=“8cm”}
{#figgjkcuboid width=“8cm”}
 {#figgjkcuboid2 width=“8cm”}
{#figgjkcuboid2 width=“8cm”}
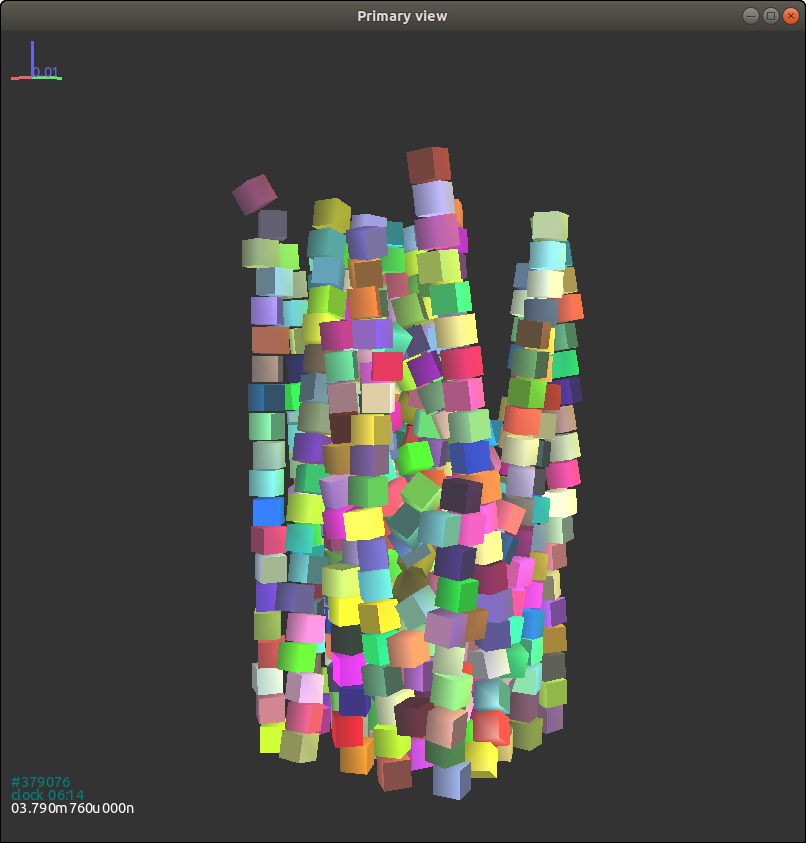
立方体的函数如下:
|
|
立方体的初始一致或随机生成朝向的自由落体过程与圆柱体非常相似。在初始朝向一致时,如图所示Fig. 3.16{reference-type=“ref” reference=“figgjkcuboid”} 自由落体结束后朝向并未发生显著变化。 但是随机初始朝向的试样,在自由落体过程前后的朝向分布有巨大的差异。 True as follows:
|
|
另外,考虑到立方体颗粒间的间隙较小,所以它们的随机朝向在自由落体前后的分布差异较圆柱体不明显。
5 - 示例 4: 组合超级椭球的堆积模拟
该示例用于组合超级椭球的堆积模拟
组合超级椭球有形如真实颗粒(砂土)的如下显著的特性 (例如, 平直度,非对称性以及棱角度)。 组合超级椭球的形状函数可以通过组装八个超级椭球的形状参数得到: $$\Big(\big|\frac{x}{r_{x}}\big|^{\frac{2}{\epsilon_{1}}} + \big|\frac{y}{r_{y}}\big|^{\frac{2}{\epsilon_{1}}}\Big)^{\frac{\epsilon_{1}}{\epsilon_{2}}} +\big |\frac{z}{r_{z}}\big|^{\frac{2}{\epsilon_{2}}} = 1$$
::: {.subequations} $$\begin{aligned} r_{x} = r_x^+ \quad{}\text{if}\quad{} x\geq 0 \quad{}\text{else}\quad{} r_x^- \label{appa} \ r_{y} = r_y^+ \quad{}\text{if}\quad{} y\geq 0 \quad{}\text{else}\quad{} r_y^- \label{appb} \ r_{z} = r_z^+ \quad{}\text{if}\quad{} z\geq 0 \quad{}\text{else}\quad{} r_z^- \label{appc}\end{aligned}$$ :::
其中 $r_x^+,r_y^+,r_z^+$ 和 $r_x^-,r_y^-,r_z^-$ 分别表示颗粒在正负主轴 x, y, z 的长度; $\epsilon_1, \epsilon_2$ 控制颗粒表面的棱角度, 对于凸颗粒来说,它们取值范围在 $(0,2)$。 图 Fig. 3.18{reference-type=“ref” reference=“figmultipolysuper”} 形象的描述了 $\epsilon_1$ 和 $\epsilon_2$ 是如何影响颗粒形状的。 Python包 _superquadrics_utils 提供了两个用来生成组合超级椭球的函数 (参见 Sec. 5.1.2{reference-type=“ref” reference=“modsuperquadrics”}):
-
NewPolySuperellipsoid(eps, rxyz, mat, rotate, isSphere, inertiaScale = 1.0)
-
NewPolySuperellipsoid_rot(eps, rxyz, mat, $q_w$, $q_x$, $q_y$, $q_z$, isSphere, inertiaScale = 1.0)
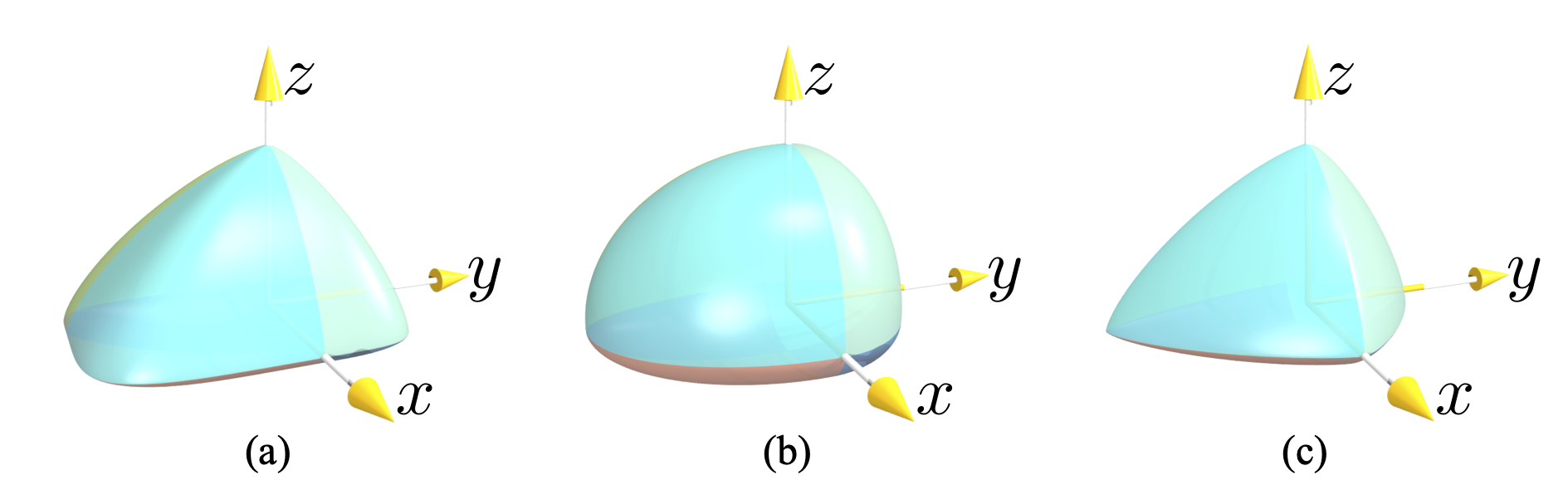 组合超级椭球及其形状参数
$r_x^+=1.0, r_x^-=0.5, r_y^+=0.8, r_y^- = 0.9, r_z^+ = 0.4, r_z^- = 0.6$
(a) $\epsilon_1=0.4, \epsilon_2=1.5$, (b)
$\epsilon_1=\epsilon_2=1.0$, (c)
$\epsilon_1=\epsilon_2=1.5$.
组合超级椭球及其形状参数
$r_x^+=1.0, r_x^-=0.5, r_y^+=0.8, r_y^- = 0.9, r_z^+ = 0.4, r_z^- = 0.6$
(a) $\epsilon_1=0.4, \epsilon_2=1.5$, (b)
$\epsilon_1=\epsilon_2=1.0$, (c)
$\epsilon_1=\epsilon_2=1.5$.
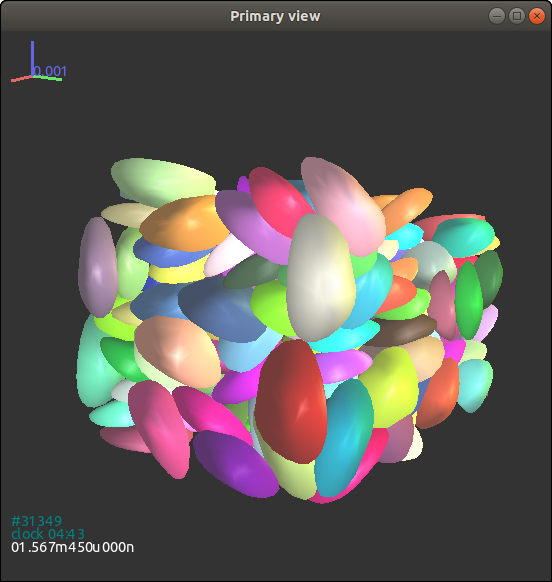
这里我们给出了组合超级椭球堆积模拟的示例脚本:
|
|
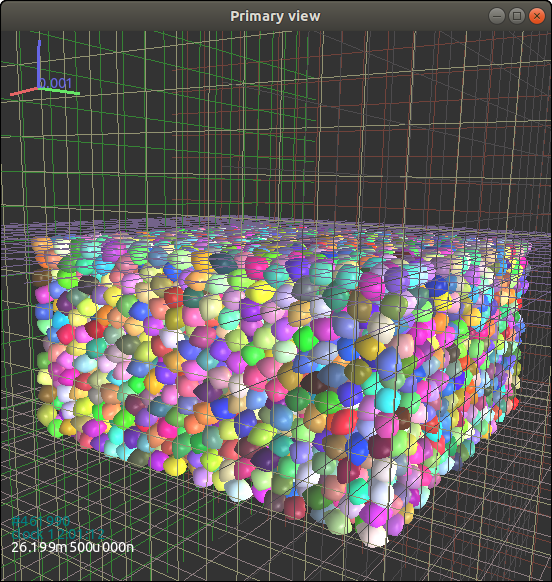
图 3.19{reference-type=“ref” reference=“figpolysuperpacking”} 给出了组合超级椭球堆积模拟的结果示意图。
 {#figpolysuperpacking
width=“10cm”}
{#figpolysuperpacking
width=“10cm”}
6 - 示例 5: 超椭圆堆积模拟
该示例给出了超椭圆的堆积模拟 (超级椭球的二维形状)
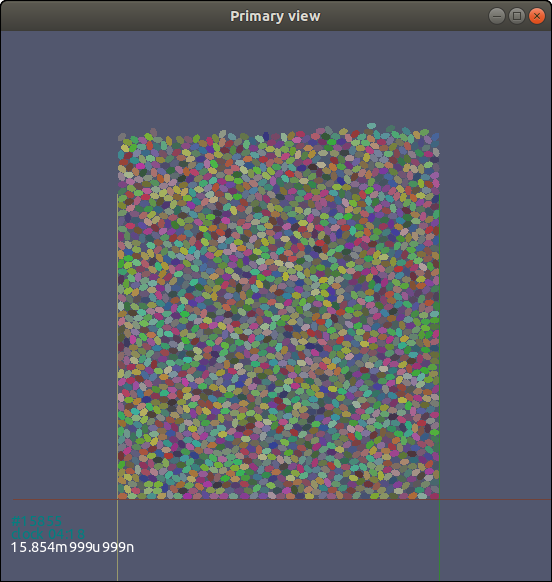
超椭圆局部坐标系下的形状函数如下式: $$\big|\frac{x}{r_x}\big|^{\frac{2}{\epsilon}} + \big|\frac{y}{r_y}\big|^{\frac{2}{\epsilon}} = 1$$ 其中 $r_x$ 和 $r_y$ 分别表示x和y轴的半长轴长度; $\epsilon \in (0, 2)$ 控制了颗粒表面的棱角度。 我们这里给出了超椭圆在重力作用下自由落体堆积的模拟脚本:
|
|
如上脚本需使用 sudodem2d 运行,模拟结果如图所示 Fig. 3.20{reference-type=“ref” reference=“figpackingellipse”}。
 {#figpackingellipse width=“10cm”}
{#figpackingellipse width=“10cm”}