4.1. MPM vs FEM¶
MPM隶属于无网格法或者弱网格依赖方法。MPM主要包括物质点和背景网格两部分,物质点携带所有状态信息,例如动量、应力及应变等,而背景网格仅在求解映射中发挥作用,本身并不携带任何状态信息。与经典的有网格法有限元法 (FEM) 相比,MPM可被视为高斯点可自由移动的特殊FEM方法。
传统的FEM求解过程如下 (Python 伪代码):
1import fem # 总刚度矩阵, K; 节点位移, u; 增量位移, du; 总荷载, b;
2for i in range(steps):
3 #组装局部刚度矩阵
4 for ele in fem.elements:
5 # B为位移-应变协同矩阵, D为等效雅可比
6 ele.K = ele.BTDB()
7 # 单元到总刚的坐标映射矩阵
8 trsf = ele.Transformation()
9 # 组装总刚度矩阵
10 K += trsf.T * ele.K * trsf
11 # 应力加载
12 stress = stress + D * (BT * du)
13 b += trsf.T * stress
14 # 加载外力边界
15 for nd in fem.nodes()
16 b += nd.extf()
17 # 边界条件,以拉格朗日乘子算法为例
18 # lambda 为拉格朗日乘子, O为零矩阵
19 # bclhs 为位移约束条件左侧系数矩阵; bcrhs 为位移约束条件右侧系数矩阵
20 K = [[K, lambda * bclhs], [(lambda * bclhs).T, O]]
21 du = [[du], [lambda]]; b = [[b], bcrhs]
22 # 求解,直接求解: QR, PLU, CHOLESKY;迭代求解:PCG
23 du = fem.Solve(); u += du
24 # 检测是否收敛
25 if(fem.checkConverge()): break
代码高亮部分与FEM网格畸变的显著相关,当材料求解域发生较大变形,尤其是剪切变形时, 高斯点与节点映射矩阵会出现奇异,进而导致计算不收敛。
MPM针对此数值不稳定性做出的改善如下:
1import mpm
2#物质点位移, u; 质量,m; 速度, v;
3#物质点体积,vol;应力,stress
4u, v, m, stress = mpm.mps()
5#节点质量,node_m;速度,node_v;动量,node_mv;力,node_f
6node_m, node_v, node_mv, node_f = mpm.nds()
7
8for i in range(steps):
9 #更新映射函数sf;映射梯度函数dsf
10 sf = sf(u); dsf = dsf(u)
11 #P2G: 物质点向节点映射映射动量、质量
12 node_m = sf * m
13 node_mv = sf * m * v; node_v = node_mv / node_m
14 #G2P: 节点向物质点映射速度梯度gradv;F为变形梯度
15 gradv = dsf * node_v; dF = e^(gradv * dt) * F
16 vol = det(dF) * vol
17 stress = stress(D, dF)
18 #P2G: 物质点向节点映射应力
19 node_f = vol * dsf * stress
20 #G2G: 节点积分
21 node_v += node_f * dt / node_m
22 #G2P: 节点向物质点映射速度
23 v = node_v * sf
24 u += v * dt
高亮部分为MPM动态更新的节点与物质点映射函数;该灵活的映射关系以损失一定的计算精度为代价, 为MPM换取了求解大变形问题更为稳定的收敛性。
备注
尽管FEM与MPM都会在计算中更新形函数或其偏导,但相较FEM,MPM物质点与节点的映射关系是非恒定的。
4.2. MPM 离散与迭代格式¶
4.2.1. 插值形函数¶
MPM求解域的节点与物质点构型参见 图 4.1。图中浅蓝色区域为求解域,深蓝色点为离散表征材料的物质点,红色点为节点。物质点与节点的插值过程如红色箭头与黄色区域所示,物质点与所处其插值形函数范围的节点发生映射。
图 4.1 物质点法拉格朗日及欧拉描述示意图¶
MPM与FEM遵循相同的动量方程强形式,
但MPM具有不同的离散形式,
MPM对质量、动量以及接触力的离散基于插值形函数,经典形函数称为 线性 形函数,这也是FEM的节点与高斯点的映射函数格式。MPM2D 不仅支持线性形函数,同时支持更为高阶的 GIMP [1] 和 CPDI [2] 函数,用以降低物质点穿越网格导致的信息丢失。
4.2.2. 迭代格式¶
以GIMP为例,形函数及其偏导的计算依据如下公式,
Footnotes
物质点与节点在求解不同阶段进行不同 方向 以及不同 状态量 的映射,
求解阶段, 映射状态量
P2G
质量,动量
USF:G2P
速度梯度
USF
应变及应力
P2G
外力及内力
G2P
速度及加速度
G2G
牛顿积分
USL:G2P
速度梯度
USL
应变及应力
P为Particle缩写,G为Grid缩写。P2G表示物质点向节点的映射,G2P表示节点向物质点的映射。P2P和G2G各自表示物质点或节点自身的状态量更新。图 4.2 给出了P2G,G2G,G2P以及P2P的映射过程。
图 4.2 物质点法迭代流程¶
当物质点与节点自由度相差较大时,MPM的G2P阶段的速度梯度映射会显著提高 应变 和 应力 更新的求解误差。USF (Update Stress First) 和USL (Update Stress Last) 迭代格式分别在G2P阶段前后完成应力和应变更新,用以降低映射误差。
4.3. MPM多物理场求解¶
4.3.1. 热求解¶
MPM2D 热力学求解的离散形式如下,
与力学求解类似,热的求解同样遵循P2G2P顺序,但由于热力学方程的温度偏导为二阶, 所以有两次P2G阶段分别映射 温度 及 热通量 :
P2G: 物质点向节点映射温度场
G2P: 节点向物质点映射温度场梯度
P2G: 物质点向节点映射热通量
G2G: 节点更新温度
G2P: 节点向物质点映射温度
注意
MPM2D 实现了热力耦合求解,在其内部力与热求解器采用 独立迭代-信息映射-独立迭代 的模式完成耦合。在非信息映射阶段,热与力可并行完成各自迭代过程。MPM2D 信息映射 阶段可通过边界条件以及材料本构完成热与力的耦合。MPM2D 支持热力混合边界,同时支持连续介质本构模型以及DEM RVE多尺度模型的热力响应,包括热力应变、热力张量以及相变。详细请参见相变及 多尺度章节。
4.3.2. 相变求解¶
MPM2D 的热力-相变求解基于固相-冰相-液相混合理论,假定混合介质饱和度为1,同时不考虑液相相对流动以及热传导和对流过程。MPM2D 在宏观尺度通过热力学框架完成液相和冰相冻融循环模拟,在细观尺度为连续介质本构或DEM RVE多尺度模型提供材料热力-相变响应接口。
对于 图 4.3 中所示的混合介质,固相和液相等效热学状态量由下式给出,
图 4.3 包含固相、液相和冰相的混合介质¶
固相和液相孔隙比控制方程有,
液相和冰相考虑未冻水的孔隙比控制方程有,
相变潜热控制方程有,
最终得到相变在热求解中的等效状态量,
相变与热求解的耦合公式 (4.9) 体现了相变潜热对材料热力场的额外贡献,进而将材料热力响应与固液相孔隙比转化联系起来。
若要进一步表征相变对材料应力-应变关系的关系,则需考虑材料初始状态固相孔隙率,相变过程中未冻水消散速率以及 相变对材料塑性因子的影响。MPM2D 的DEM RVE多尺度模块综合考虑以上因素,为多尺度和多物理场复杂初值和边值问题的求解提供了可能,详情参见 多尺度章节 。
4.3.3. 接触求解¶
MPM2D 支持MPM经典的基于网格的多体接触算法。MPM网格接触引擎利用节点速度场判别多体接触与否:
警告
传统的接触检测算法在接触法向确定方面具有较大任意性;若引入GIMP形函数,材料可能发生提前接触。
MPM2D 同时提供了更为灵活的DEM驱动的多体接触引擎如 图 4.4 所示,DEM接触引擎分为:
刚体-非刚体接触
非刚体-非刚体接触
图 4.4 MPM2D 接触类型:(a) 刚体-非刚体;(b) 非刚体-非刚体¶
刚性物质点 或者 刚性块 多用于边界条件的施加,在此过程中接触算法仅更新非刚体物质点的动量信息。非刚体-非刚体 接触算法中不涉及刚性物质点,所有与接触相关的物质点都会进行动量的更新。
不同材料物质点的接触力由 嵌入深度 和 速度 决定 (图 4.5),
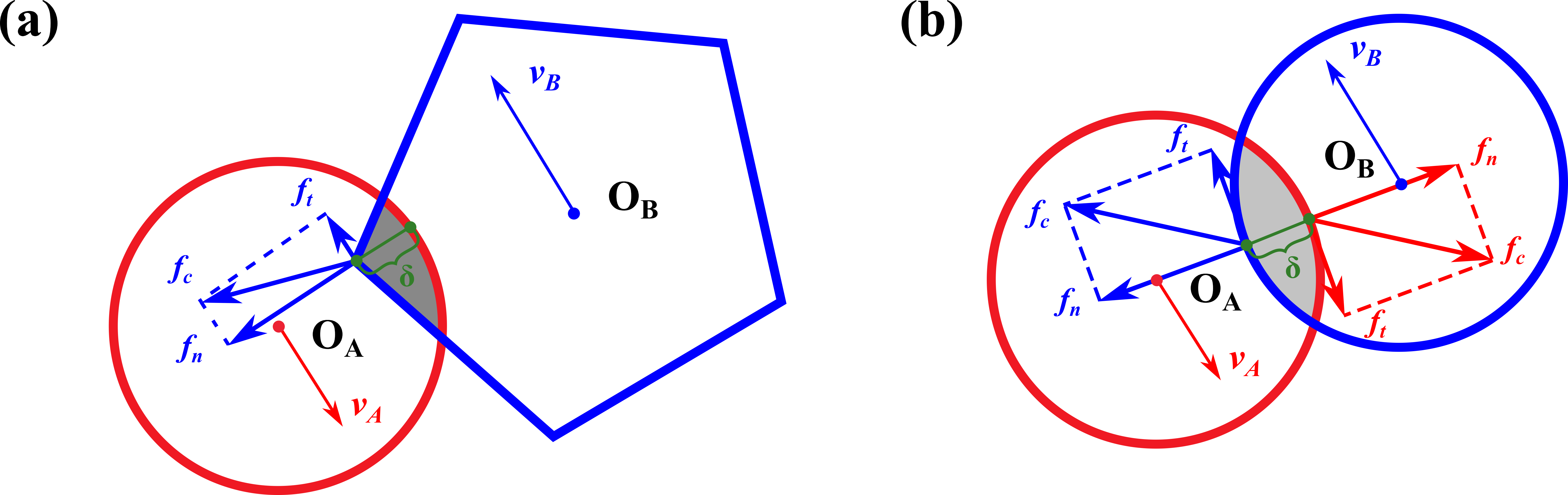
图 4.5 MPM2D DEM接触的力-位移定律¶
物质点或刚体的形状和位置确定了接触的 法向 ,灰色的嵌入面积或绿色的嵌入深度决定了 法向接触力 的大小,接触物体的相对速度决定了 切向接触力 的大小。
接触力的施加参见 图 4.6,图中给出了以面力方式施加接触力的示意图,虚线表示的uGIMP插值域在节点帮助下完成物质点的接触力积分及施加。
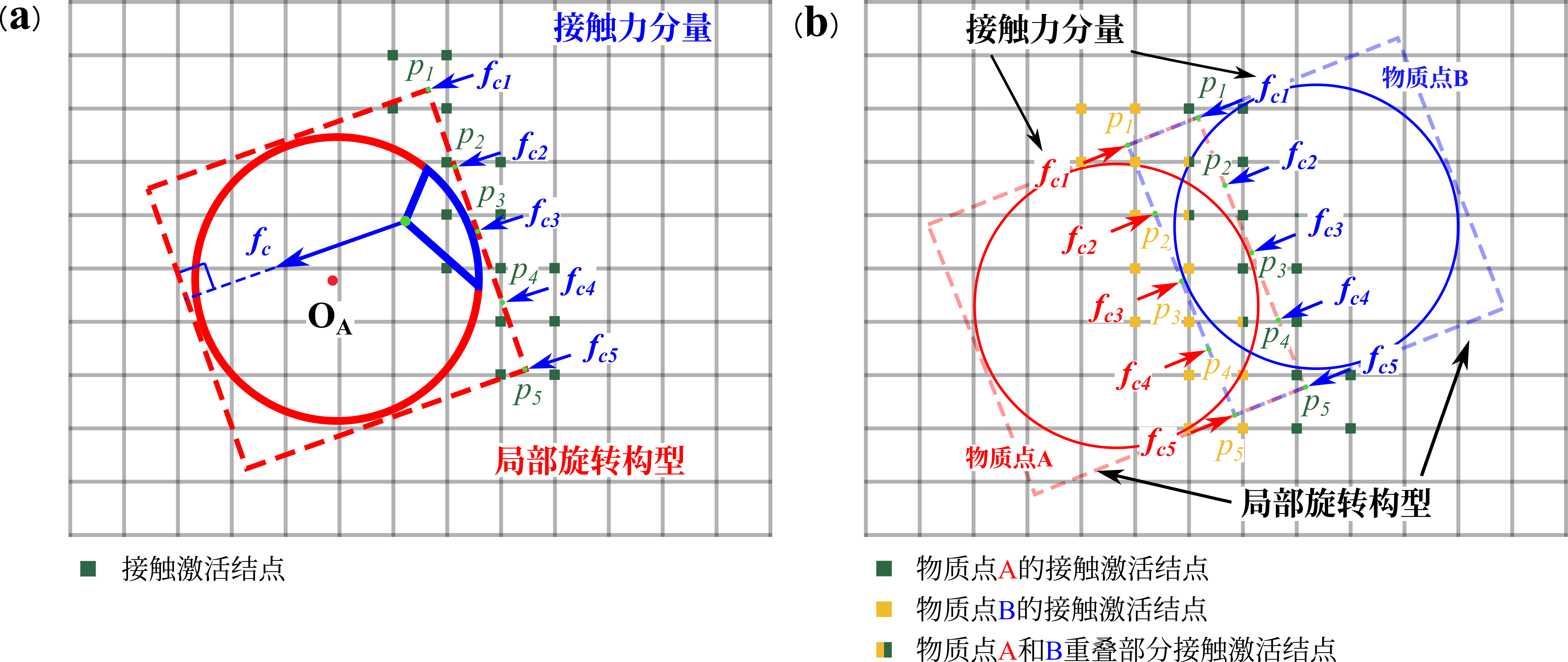
图 4.6 MPM2D DEM接触力施加:(a) 刚体-非刚体;(b) 非刚体-非刚体¶