8.6. 扩展超椭球的堆积模拟¶
8.6.1. 扩展超椭球¶
扩展超椭球(Poly-superellipsoid)可以很好捕捉自然界中沙子等真实颗粒的主要特征(如长细比、非对称性和棱角度)的能力。 扩展超椭球由八块超椭球组合而成的, 在局部笛卡尔坐标系下形状控制方程如下:
其中 \(r_x^+,r_y^+,r_z^+\) 和 \(r_x^-,r_y^-,r_z^-\) 分别表示颗粒在正负主轴 x, y, z 的长度; \(\epsilon_1, \epsilon_2\) 控制颗粒表面的棱角度, 对于凸颗粒来说,它们取值范围在 $(0,2)$。图 8.18 形象的描述了 \(\epsilon_1\) 和 \(\epsilon_2\) 是如何影响颗粒形状的。 Python包 _superquadrics_utils 提供了两个用来生成扩展超椭球的函数:
NewPolySuperellipsoid(eps, rxyz, mat, rotate, isSphere, inertiaScale = 1.0)
NewPolySuperellipsoid_rot(eps, rxyz, mat, \(q_w\), \(q_x\), \(q_y\), \(q_z\), isSphere, inertiaScale = 1.0)
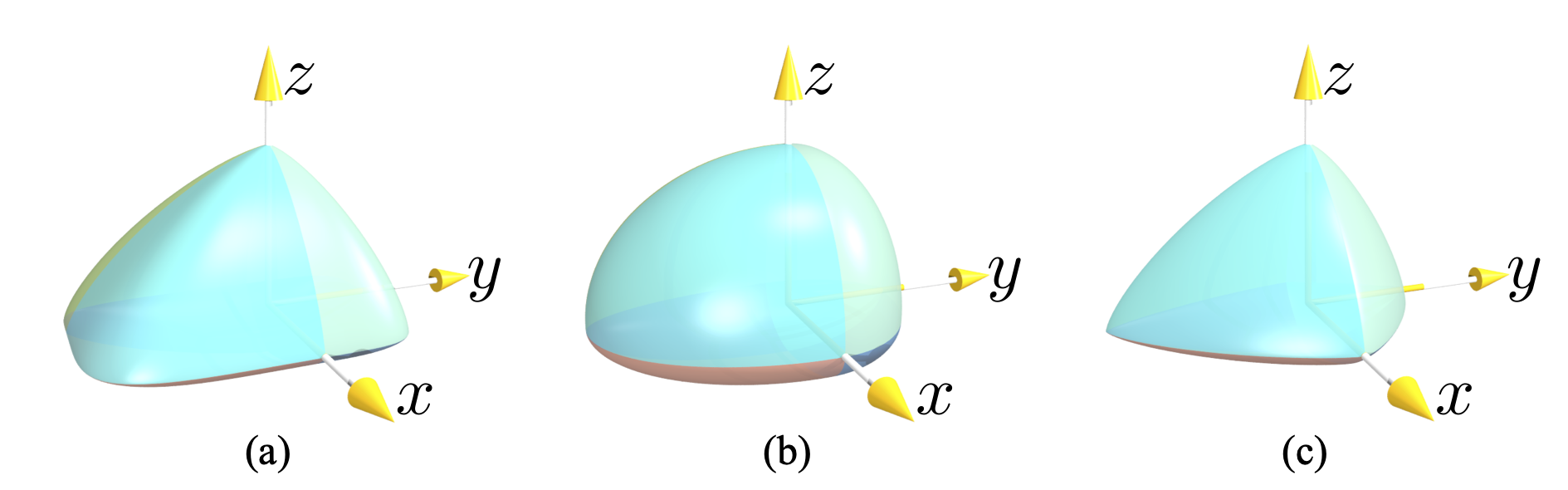
图 8.18 扩展超椭球及其形状参数 \(r_x^+=1.0, r_x^-=0.5, r_y^+=0.8, r_y^- = 0.9, r_z^+ = 0.4, r_z^- = 0.6\) (a) \(\epsilon_1=0.4, \epsilon_2=1.5\), (b) \(\epsilon_1=\epsilon_2=1.0\), (c) \(\epsilon_1=\epsilon_2=1.5\).¶
8.6.2. 建模脚本¶
这里我们给出了扩展超椭球堆积模拟的示例脚本:
- 导入基础包
1from sudodem._superquadrics_utils import * 2import math 3import random 4import numpy as np
- 模拟参数
1a=1.1734e-2 2isSphere=False 3ap=0.4 4eps=0.5 5num_s=200 6num_t=8000 7trials=0 8# 颗粒生成的盒子大小 9wallboxsize=[10e-1,0,0] 10boxsize=np.array([7e-1,7e-1,20e-1])
- 定义辅助函数
1# 给定所有颗粒向下的速度 2def down(): 3 for b in O.bodies: 4 if(isinstance(b.shape,PolySuperellipsoid)): 5 if(len(b.intrs())==0): 6 b.state.vel=[0,0,-2] 7 b.state.angVel=[0,0,0] 8 9# 获得堆积体最高位置 10def gettop(): 11 zmax=0 12 for b in O.bodies: 13 if(isinstance(b.shape,PolySuperellipsoid)): 14 if(b.state.pos[2]>=zmax): 15 zmax=b.state.pos[2] 16 return zmax 17 18# 生成颗粒 19def Genparticles(a,eps,ap,mat,boxsize,num_s,num_t,bottom): 20 global trials 21 gap=max(a,a*ap) 22 #print(gap) 23 num=0 24 coor=[] 25 width=(boxsize[0]-2.*gap)/2. 26 length=(boxsize[1]-2.*gap)/2. 27 height=(boxsize[2]-2.*gap) 28 #iteration=0 29 while num<num_s and trials<num_t: 30 isOK=True 31 pos=[0]*3 32 pos[0]=random.uniform(-width,width) 33 pos[1]=random.uniform(gap-length,length-gap) 34 pos[2]=random.uniform(bottom+gap,bottom+gap+height) 35 36 for i in range(0,len(coor)): 37 distance=sum([((coor[i][j]-pos[j])**2.) for j in range(0,3)]) 38 if(distance<(4.*gap*gap)): 39 40 isOK=False 41 break 42 43 if(isOK==True): 44 coor.append(pos) 45 num+=1 46 trials+=1 47 #print(num) 48 return coor 49 50# 添加一层颗粒 51def Addlayer(a,eps,ap,mat,boxsize,num_s,num_t): 52bottom=gettop() 53coor=Genparticles(a,eps,ap,mat,boxsize,num_s,num_t,bottom) 54for b in coor: 55 #xyz = np.array([1.0,0.5,0.8,1.5,1.2,0.4])*0.1 56 xyz = np.array([1.0,0.5,0.8,1.5,0.2,0.4])*0.1 57 bb=NewPolySuperellipsoid([1.0,1.0],xyz,mat,True,isSphere)# 58 bb.state.pos=[b[0],b[1],b[2]] 59 bb.state.vel=[0,0,-1] 60 O.bodies.append(bb) 61down()
- 定义材料
1p_mat = PolySuperellipsoidMat(label="mat1",Kn=1e5,Ks=7e4,frictionAngle=math.atan(0.3),density=2650,betan=0,betas=0) #define Material with default values 2wall_mat = PolySuperellipsoidMat(label="wallmat",Kn=1e6,Ks=7e5,frictionAngle=0.0,betan=0,betas=0) #define Material with default values 3wallmat_b = PolySuperellipsoidMat(label="wallmat",Kn=1e6,Ks=7e5,frictionAngle=math.atan(1),betan=0,betas=0) #define Material with default values 4 5O.materials.append(p_mat) 6O.materials.append(wall_mat) 7O.materials.append(wallmat_b)
- 生成墙/容器
1O.bodies.append(utils.wall(-0.5*wallboxsize[0],axis=0,sense=1, material = wall_mat))#left x 2O.bodies.append(utils.wall(0.5*wallboxsize[0],axis=0,sense=-1, material = wall_mat))#right x 3O.bodies.append(utils.wall(-0.5*boxsize[1],axis=1,sense=1, material = wall_mat))#front y 4O.bodies.append(utils.wall(0.5*boxsize[1],axis=1,sense=-1, material = wall_mat))#back y 5 6O.bodies.append(utils.wall(0,axis=2,sense=1, material =wallmat_b))#bottom z 7#O.bodies.append(utils.wall(boxsize[0],axis=2,sense=-1, material = wallmat_b))#top z
- 设置引擎
1newton=NewtonIntegrator(damping = 0.3,gravity=(0.,0.,-9.8),label="newton",isSuperquadrics=2)#isSuperquadrics=2 for Poly-superellipsoids 2 3O.engines=[ 4ForceResetter(), 5InsertionSortCollider([Bo1_PolySuperellipsoid_Aabb(),Bo1_Wall_Aabb()],verletDist=0.2*0.1), 6InteractionLoop( 7 [Ig2_Wall_PolySuperellipsoid_PolySuperellipsoidGeom(), Ig2_PolySuperellipsoid_PolySuperellipsoid_PolySuperellipsoidGeom()], 8 [Ip2_PolySuperellipsoidMat_PolySuperellipsoidMat_PolySuperellipsoidPhys()], # collision "physics" 9 [PolySuperellipsoidLaw()] # 接触力本构模型 10), 11newton 12] 13O.dt=5e-5
- 生成颗粒
1#Note: these particles may intersect with each other when we generate them. 2Addlayer(a,eps,ap,p_mat,boxsize,num_s,num_t)
- 显示设置
用户可以通过界面窗口来直接更改对应设置。
1sudodem.qt.Gl1_PolySuperellipsoid.wire=False 2sudodem.qt.Gl1_PolySuperellipsoid.slices=10 3sudodem.qt.Gl1_Wall.div=0 #hide the walls
图 8.19 给出了扩展超椭球堆积模拟的结果示意图。
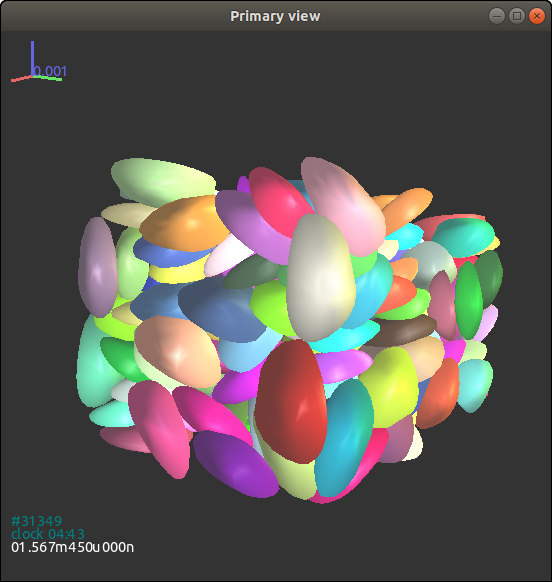
图 8.19 超椭球堆积状态¶